题目
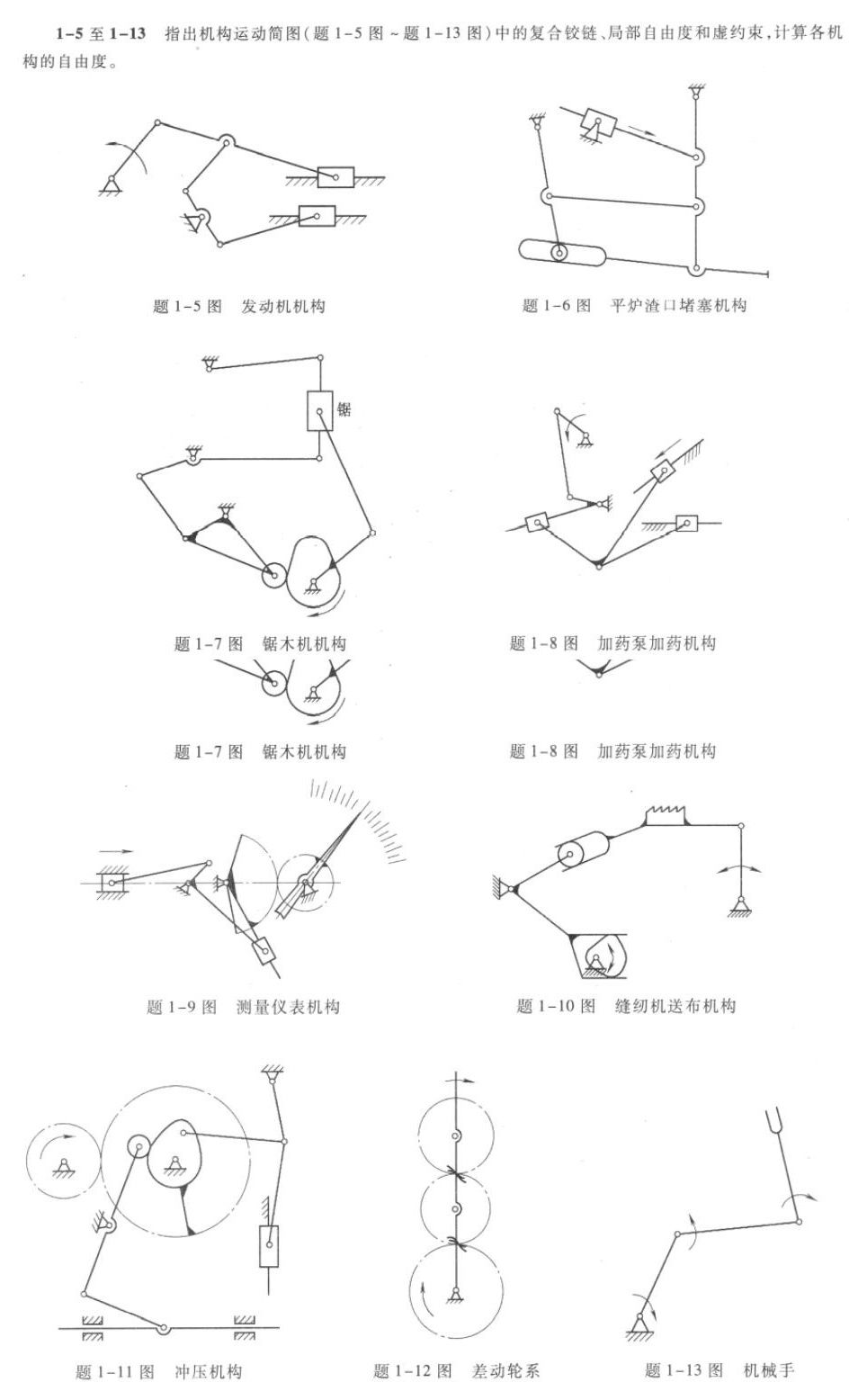
1-5 至 1-13 指出机构运动简图(题 1-5 图一题 1-13 图)中的复合铰链、局部自由度和虚约束,计算各机-|||-构的自由度。-|||-m7-|||-题 1-5 图 发动机机构 题 1-6 图 平炉渣口堵塞机构-|||-square 锯-|||-A-|||-α-|||-square -|||-题 1-7 图 锯木机机构 题 1-8 图 加药泵加药机构-|||-题 1-7 图 锯木机机构 题 1-8 图 加药泵加药机构-|||-11-|||-题 1-9 图 测量仪表机构 题 1-10 图 缝纫机送布机构-|||-十-|||-u-|||-月-|||-1-|||-、-|||-A-|||-m-|||-题 1-11 图 冲压机构 题 1-12 图 差动轮系 题 1-13 图 机械手
题目解答
答案
解析
步骤 1:确定自由度公式
自由度 $F$ 的计算公式为 $F=3n-2{P}_{L}-{P}_{H}$,其中 $n$ 是活动构件的数量,${P}_{L}$ 是低副的数量,${P}_{H}$ 是高副的数量。
步骤 2:计算题 1-5 图发动机机构的自由度
- 活动构件数量 $n=7$
- 低副数量 ${P}_{L}=10$
- 高副数量 ${P}_{H}=0$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 7-2\times 10-0=1$
步骤 3:计算题 1-6 图平炉渣口堵塞机构的自由度
- 活动构件数量 $n=6$
- 低副数量 ${P}_{L}=8$
- 高副数量 ${P}_{H}=1$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 6-2\times 8-1=1$
步骤 4:计算题 1-7 图锯木机机构的自由度
- 活动构件数量 $n=8$
- 低副数量 ${P}_{L}=11$
- 高副数量 ${P}_{H}=1$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 8-2\times 11-1=1$
步骤 5:计算题 1-8 图加药泵加药机构的自由度
- 活动构件数量 $n=8$
- 低副数量 ${P}_{L}=11$
- 高副数量 ${P}_{H}=0$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 8-2\times 11-0=2$
步骤 6:计算题 1-9 图测量仪表机构的自由度
- 活动构件数量 $n=6$
- 低副数量 ${P}_{L}=8$
- 高副数量 ${P}_{H}=1$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 6-2\times 8-1=1$
步骤 7:计算题 1-10 图缝纫机送布机构的自由度
- 活动构件数量 $n=4$
- 低副数量 ${P}_{L}=4$
- 高副数量 ${P}_{H}=2$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 4-2\times 4-2=2$
步骤 8:计算题 1-11 图冲压机构的自由度
- 活动构件数量 $n=9$
- 低副数量 ${P}_{L}=12$
- 高副数量 ${P}_{H}=2$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 9-2\times 12-2=1$
步骤 9:计算题 1-12 图的自由度
- 活动构件数量 $n=4$
- 低副数量 ${P}_{L}=4$
- 高副数量 ${P}_{H}=2$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 4-2\times 4-2=2$
步骤 10:计算题 1-13 图机械手的自由度
- 活动构件数量 $n=3$
- 低副数量 ${P}_{L}=3$
- 高副数量 ${P}_{H}=0$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 3-2\times 3-0=3$
自由度 $F$ 的计算公式为 $F=3n-2{P}_{L}-{P}_{H}$,其中 $n$ 是活动构件的数量,${P}_{L}$ 是低副的数量,${P}_{H}$ 是高副的数量。
步骤 2:计算题 1-5 图发动机机构的自由度
- 活动构件数量 $n=7$
- 低副数量 ${P}_{L}=10$
- 高副数量 ${P}_{H}=0$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 7-2\times 10-0=1$
步骤 3:计算题 1-6 图平炉渣口堵塞机构的自由度
- 活动构件数量 $n=6$
- 低副数量 ${P}_{L}=8$
- 高副数量 ${P}_{H}=1$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 6-2\times 8-1=1$
步骤 4:计算题 1-7 图锯木机机构的自由度
- 活动构件数量 $n=8$
- 低副数量 ${P}_{L}=11$
- 高副数量 ${P}_{H}=1$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 8-2\times 11-1=1$
步骤 5:计算题 1-8 图加药泵加药机构的自由度
- 活动构件数量 $n=8$
- 低副数量 ${P}_{L}=11$
- 高副数量 ${P}_{H}=0$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 8-2\times 11-0=2$
步骤 6:计算题 1-9 图测量仪表机构的自由度
- 活动构件数量 $n=6$
- 低副数量 ${P}_{L}=8$
- 高副数量 ${P}_{H}=1$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 6-2\times 8-1=1$
步骤 7:计算题 1-10 图缝纫机送布机构的自由度
- 活动构件数量 $n=4$
- 低副数量 ${P}_{L}=4$
- 高副数量 ${P}_{H}=2$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 4-2\times 4-2=2$
步骤 8:计算题 1-11 图冲压机构的自由度
- 活动构件数量 $n=9$
- 低副数量 ${P}_{L}=12$
- 高副数量 ${P}_{H}=2$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 9-2\times 12-2=1$
步骤 9:计算题 1-12 图的自由度
- 活动构件数量 $n=4$
- 低副数量 ${P}_{L}=4$
- 高副数量 ${P}_{H}=2$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 4-2\times 4-2=2$
步骤 10:计算题 1-13 图机械手的自由度
- 活动构件数量 $n=3$
- 低副数量 ${P}_{L}=3$
- 高副数量 ${P}_{H}=0$
- 代入公式 $F=3n-2{P}_{L}-{P}_{H}=3\times 3-2\times 3-0=3$