题目
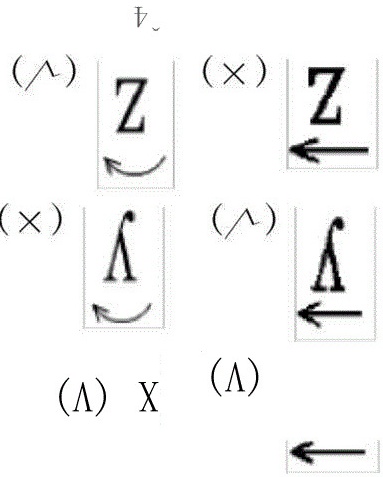
根据六点定位原理,分析图中各工件需要限制哪些的自由度,指出工序基准,选择定位基准并用定位符号在图中表示出来^4) A A-|||-X)X x^4) A A-|||-X)X x解:^4) A A-|||-X)X x⏺些自由度,判断有无欠定位与过定位,并对不合理的定位方案提出改进意见。
根据六点定位原理,分析图中各工件需要限制哪些的自由度,指出工序基准,选择定位
基准并用定位符号在图中表示出来
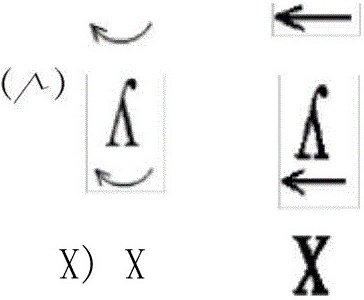
 解:
解:
⏺
些自由度,判断有无欠定位与过定位,并对不合理的定位方案提出改进意见。
题目解答
答案
解:
该方案出现过定位,改进措施;(1)去掉三爪卡盘;
(2)将前顶尖换为一支承。
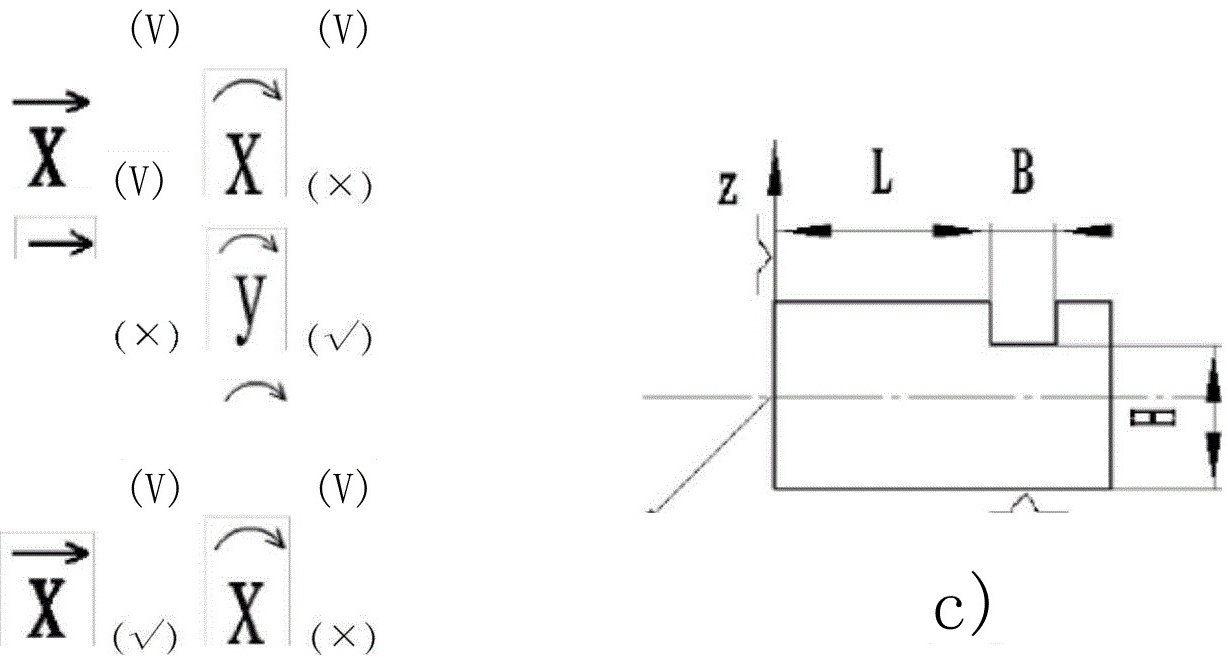
该方案出现过定位,右边 V形块改为可浮动,使工件与 V形块得两边都能接
e )
该方案出现过定位,将右边 V形块改为x可移动
5-10、什么是机床夹具?举例说明夹具在机械加工中的作用。
答:机床夹具:是在机床上用以装夹工件连续切削顺利进行的一种工艺装备。
机床夹具的功用:①稳定保证工件的加工精度;
②减少辅助工时,提高劳动生产率; ③扩大机床的使用范围,实现一机多能
举例:用V形块,用三爪卡盘,顶尖可很好的保证工件的定位精度,以及工件
相对于刀具和机床的位置精度。如图 a.b
解析
考查要点:本题主要考查六点定位原理的应用,包括自由度分析、定位基准的选择、过定位与欠定位的判断及改进方案设计。
解题核心思路:
- 自由度分析:根据工件加工要求,确定需要限制的自由度(移动/转动)。
- 定位基准选择:明确工序基准,选择与工序基准重合的定位基准。
- 过定位判断:若定位元件限制了多余的自由度(如重复限制同一自由度),则为过定位,需调整定位方案。
- 改进方案:通过减少冗余定位元件或增加浮动结构消除过定位。
方案分析与改进
方案1:三爪卡盘+前顶尖定位
- 问题:三爪卡盘限制全部6个自由度,前顶尖重复限制Z轴移动自由度,导致过定位。
- 改进措施:
- 去掉三爪卡盘,仅用前顶尖和V形块定位。
- 将前顶尖换为支承,避免重复限制自由度。
方案2:双V形块+支承定位
- 问题:右侧V形块固定,导致重复限制Y轴移动自由度。
- 改进措施:将右侧V形块改为可浮动,使其仅限制工件转动自由度,消除过定位。
方案3:V形块+支承定位
- 问题:右侧V形块固定,限制多余自由度。
- 改进措施:将右侧V形块设计为可移动,仅参与定位而不强制固定。