题目
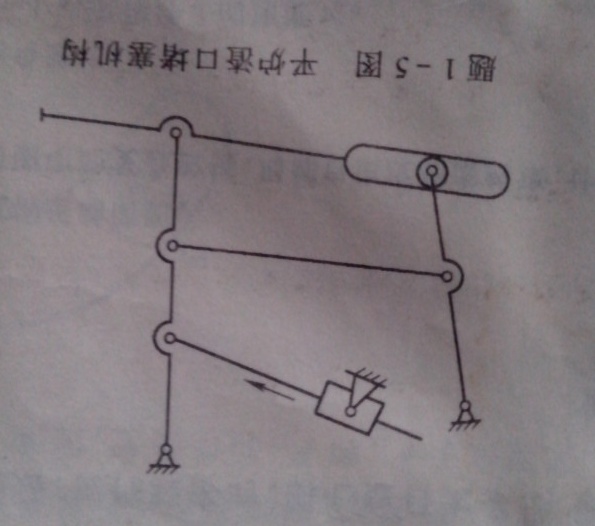
指出下图机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度.
指出下图机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度.
题目解答
答案
自由构件n=6 低副PL=8 高副PH=1
F=3n-2PL-PH=3*6-2*8-1=1
不存在复合铰链与虚约束 在滚子地方存在局部自由度
F=3n-2PL-PH=3*6-2*8-1=1
不存在复合铰链与虚约束 在滚子地方存在局部自由度
解析
考查要点:本题主要考查机构自由度的计算,以及识别复合铰链、局部自由度和虚约束的能力。
解题核心思路:
- 确定活动构件数($n$)、低副数($P_L$)、高副数($P_H$),代入公式 $F = 3n - 2P_L - P_H$;
- 复合铰链需判断是否存在三个及以上构件共用同一转动副;
- 局部自由度常见于滚子与凸轮接触处,需单独说明;
- 虚约束需判断是否存在因几何条件自然满足的约束。
破题关键:
- 滚子的局部自由度是易忽略点,需注意其绕自身轴线转动的自由度;
- 虚约束需结合机构结构分析,本题中不存在此类情况。
1. 确定基本参数
- 活动构件数($n$):图中包含6个活动构件(滑块、连杆、曲柄等)。
- 低副数($P_L$):共8个低副(转动副和移动副),如滑块与导轨的移动副、各转动副。
- 高副数($P_H$):滚子与凸轮接触形成1个高副。
2. 计算自由度
代入公式:
$F = 3n - 2P_L - P_H = 3 \times 6 - 2 \times 8 - 1 = 1$
3. 分析特殊要素
- 复合铰链:所有转动副均为两构件共用,不存在复合铰链。
- 局部自由度:滚子可绕自身轴线转动,该自由度不影响整体运动,属于局部自由度。
- 虚约束:机构中无因几何条件自然满足的约束,故不存在虚约束。