题目
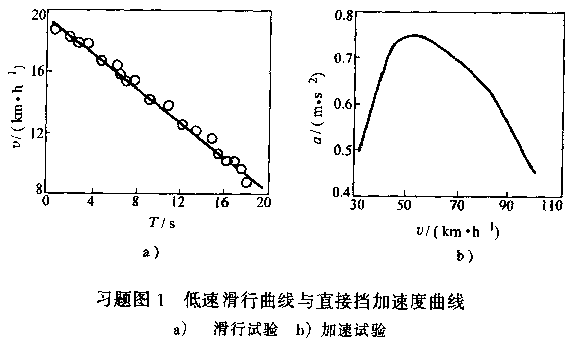
一辆后轴驱动汽车的总质量[1]2152kg,前轴负荷52%,后轴负荷48%,主传动比i=4。55,变速器传动比:一挡:3.79,二挡:2。17,三挡:1.41,四挡:1.00,五挡:0. 86。质心高度hg =0.57m,CDA=1。5 m2,轴距L=2。300m,飞轮转动惯量If=0。22kg·m2,四个车轮总的转动惯量Iw=3。6 kg·m2,车轮半径r=0.367m.该车在附着系数φ=0.6的路面上低速滑行曲线和直接挡加速曲线如习题图1所示。图上给出了滑行数据的拟合直线ua=19.76-0.59T,ua的单位为km/h,T的单位为s,直接挡最大加速度amax=0.75m/s2 (ua=50km/h)。设各挡传动效率均为0。90,求:1)汽车在该路面上的滚动阻力系数。2)求直接挡的最大动力因素。3)在此路面上该车的最大爬坡度. 0.8-|||-.75-|||-16-|||-0.6-|||-12| p -|||-0.5-|||-8-|||-0 4 8 12 16 20 0.4-|||-30 50 70 90 -|||-T/s /(kmcdot h)-|||- b)-|||-习题图1 低速滑行曲线与直接挡加速度曲线-|||-a) 滑行试验 b) 加速试验
一辆后轴驱动汽车的总质量[1]2152kg,前轴负荷52%,后轴负荷48%,主传动比i=4。55,变速器传动比:一挡:3.79,二挡:2。17,三挡:1.41,四挡:1.00,五挡:0. 86。质心高度hg =0.57m,CDA=1。5 m2,轴距L=2。300m,飞轮转动惯量If=0。22kg·m2,四个车轮总的转动惯量Iw=3。6 kg·m2,车轮半径r=0.367m.该车在附着系数φ=0.6的路面上低速滑行曲线和直接挡加速曲线如习题图1所示。图上给出了滑行数据的拟合直线ua=19.76-0.59T,ua的单位为km/h,T的单位为s,直接挡最大加速度amax=0.75m/s2 (ua=50km/h)。设各挡传动效率均为0。90,求:
1)汽车在该路面上的滚动阻力系数。
2)求直接挡的最大动力因素。
3)在此路面上该车的最大爬坡度.
题目解答
答案
解:1> 由汽车行驶方程式:


低速滑行时, ,
此时:
由低速滑行曲线拟合直线公式可得:



2〉 直接档, 〈四档>
先求汽车质量换算系数  :
:
:
代入数据得: 
再由动力特性方程:
所以: 


3>最大爬坡度由一挡决定


可得,发动机决定的最大爬坡度为:



由地面决定的最大爬坡度为:
结论:可以爬过坡度为33。8%的坡道。
解析
步骤 1:计算滚动阻力系数
根据题目给出的低速滑行曲线拟合直线公式 $u_a = 19.76 - 0.59T$,其中 $u_a$ 的单位为 km/h,$T$ 的单位为 s。首先,将速度单位从 km/h 转换为 m/s,即 $u_a = \frac{19.76}{3.6} - 0.59T$。然后,根据汽车行驶方程式,低速滑行时,牵引力 $F_t$ 等于滚动阻力 $F_f$,即 $F_t = F_f$。滚动阻力 $F_f$ 可以表示为 $F_f = fG$,其中 $f$ 是滚动阻力系数,$G$ 是汽车的重力。因此,滚动阻力系数 $f$ 可以通过计算加速度 $a$ 来求得,即 $f = -\frac{8du}{gdt}$,其中 $g$ 是重力加速度,$du$ 是速度变化量,$dt$ 是时间变化量。
步骤 2:计算直接挡的最大动力因素
直接挡的最大动力因素 $D_{0max}$ 可以通过动力特性方程 $D = f + i + \frac{s}{g} \frac{du}{dt}$ 来求得,其中 $f$ 是滚动阻力系数,$i$ 是传动比,$s$ 是质量换算系数,$\frac{du}{dt}$ 是加速度。质量换算系数 $s$ 可以通过公式 $s = 1 + \frac{1}{m} \frac{\sum I_w}{r^2} + \frac{1}{m} \frac{1}{i_g^2} \frac{I_f}{r^2}$ 来计算,其中 $m$ 是汽车的质量,$I_w$ 是车轮的转动惯量,$r$ 是车轮半径,$i_g$ 是主传动比,$I_f$ 是飞轮的转动惯量。
步骤 3:计算最大爬坡度
最大爬坡度可以通过公式 $D_{max} = i_g D_{0max} + (i_g - \frac{1}{i_g}) \frac{F_{WQ}}{G}$ 来求得,其中 $i_g$ 是主传动比,$F_{WQ}$ 是风阻,$G$ 是汽车的重力。风阻 $F_{WQ}$ 可以通过公式 $F_{WQ} = \frac{C_D A_a u_a^2}{21.15}$ 来计算,其中 $C_D$ 是阻力系数,$A_a$ 是迎风面积,$u_a$ 是速度。最大爬坡度还可以通过公式 $q = \frac{\frac{I}{I}}{\frac{1}{q} - \frac{h_g}{L}}$ 来求得,其中 $I$ 是后轴负荷,$h_g$ 是质心高度,$L$ 是轴距。
根据题目给出的低速滑行曲线拟合直线公式 $u_a = 19.76 - 0.59T$,其中 $u_a$ 的单位为 km/h,$T$ 的单位为 s。首先,将速度单位从 km/h 转换为 m/s,即 $u_a = \frac{19.76}{3.6} - 0.59T$。然后,根据汽车行驶方程式,低速滑行时,牵引力 $F_t$ 等于滚动阻力 $F_f$,即 $F_t = F_f$。滚动阻力 $F_f$ 可以表示为 $F_f = fG$,其中 $f$ 是滚动阻力系数,$G$ 是汽车的重力。因此,滚动阻力系数 $f$ 可以通过计算加速度 $a$ 来求得,即 $f = -\frac{8du}{gdt}$,其中 $g$ 是重力加速度,$du$ 是速度变化量,$dt$ 是时间变化量。
步骤 2:计算直接挡的最大动力因素
直接挡的最大动力因素 $D_{0max}$ 可以通过动力特性方程 $D = f + i + \frac{s}{g} \frac{du}{dt}$ 来求得,其中 $f$ 是滚动阻力系数,$i$ 是传动比,$s$ 是质量换算系数,$\frac{du}{dt}$ 是加速度。质量换算系数 $s$ 可以通过公式 $s = 1 + \frac{1}{m} \frac{\sum I_w}{r^2} + \frac{1}{m} \frac{1}{i_g^2} \frac{I_f}{r^2}$ 来计算,其中 $m$ 是汽车的质量,$I_w$ 是车轮的转动惯量,$r$ 是车轮半径,$i_g$ 是主传动比,$I_f$ 是飞轮的转动惯量。
步骤 3:计算最大爬坡度
最大爬坡度可以通过公式 $D_{max} = i_g D_{0max} + (i_g - \frac{1}{i_g}) \frac{F_{WQ}}{G}$ 来求得,其中 $i_g$ 是主传动比,$F_{WQ}$ 是风阻,$G$ 是汽车的重力。风阻 $F_{WQ}$ 可以通过公式 $F_{WQ} = \frac{C_D A_a u_a^2}{21.15}$ 来计算,其中 $C_D$ 是阻力系数,$A_a$ 是迎风面积,$u_a$ 是速度。最大爬坡度还可以通过公式 $q = \frac{\frac{I}{I}}{\frac{1}{q} - \frac{h_g}{L}}$ 来求得,其中 $I$ 是后轴负荷,$h_g$ 是质心高度,$L$ 是轴距。