题目
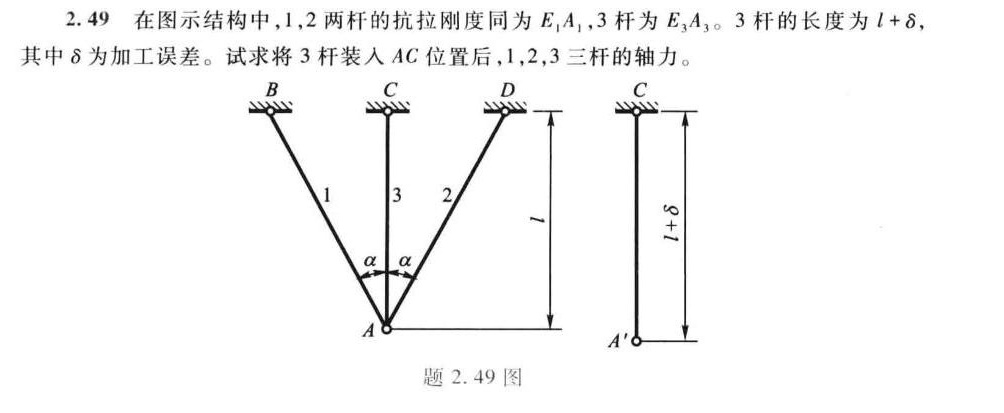
2.49 在图示结构中,1,2两杆的抗拉刚度同为E1A1,3杆为E3A3。3杆的长度为 https:/img.cdnjtzy.com/zyb_146d1f634fa1b13437c50fb5c8b006a8.jpg+8,-|||-其中δ为加工误差。试求将3杆装入AC位置后,1,2,3三杆的轴力。-|||-B C D C-|||-1 3 2.-|||-+-|||-α α-|||-A 8 A` 6-|||-题2.49图
题目解答
答案

解析
步骤 1:确定变形协调条件
在结构中,由于杆3的长度误差δ,杆1和杆2将产生相同的伸长量,以适应杆3的安装。因此,杆1和杆2的伸长量相等,且等于杆3的伸长量减去δ。
步骤 2:建立平衡方程
根据结构的对称性,杆1和杆2的轴力相等,设为${F}_{{N}_{1}}={F}_{{N}_{2}}=F$。杆3的轴力设为${F}_{{N}_{3}}$。根据力的平衡条件,有:
$$
{F}_{{N}_{1}}\cos\alpha+{F}_{{N}_{2}}\cos\alpha={F}_{{N}_{3}}
$$
即:
$$
2F\cos\alpha={F}_{{N}_{3}}
$$
步骤 3:建立变形协调方程
根据变形协调条件,杆1和杆2的伸长量相等,且等于杆3的伸长量减去δ。设杆1和杆2的伸长量为$\Delta l$,则有:
$$
\Delta l=\frac{F}{E_1A_1}\cdot l
$$
杆3的伸长量为:
$$
\Delta l_3=\frac{{F}_{{N}_{3}}}{E_3A_3}\cdot (l+\delta)
$$
根据变形协调条件,有:
$$
\Delta l=\Delta l_3-\delta
$$
即:
$$
\frac{F}{E_1A_1}\cdot l=\frac{{F}_{{N}_{3}}}{E_3A_3}\cdot (l+\delta)-\delta
$$
步骤 4:求解方程组
将步骤2中的${F}_{{N}_{3}}=2F\cos\alpha$代入步骤3中的变形协调方程,得到:
$$
\frac{F}{E_1A_1}\cdot l=\frac{2F\cos\alpha}{E_3A_3}\cdot (l+\delta)-\delta
$$
解得:
$$
F=\frac{E_1A_1E_3A_3\cos^2\alpha}{2E_1A_1\cos^3\alpha+E_3A_3}\cdot\frac{\delta}{l}
$$
因此,杆1和杆2的轴力为:
$$
{F}_{{N}_{1}}={F}_{{N}_{2}}=F=\frac{E_1A_1E_3A_3\cos^2\alpha}{2E_1A_1\cos^3\alpha+E_3A_3}\cdot\frac{\delta}{l}
$$
杆3的轴力为:
$$
{F}_{{N}_{3}}=2F\cos\alpha=\frac{2E_1A_1E_3A_3\cos^3\alpha}{2E_1A_1\cos^3\alpha+E_3A_3}\cdot\frac{\delta}{l}
$$
在结构中,由于杆3的长度误差δ,杆1和杆2将产生相同的伸长量,以适应杆3的安装。因此,杆1和杆2的伸长量相等,且等于杆3的伸长量减去δ。
步骤 2:建立平衡方程
根据结构的对称性,杆1和杆2的轴力相等,设为${F}_{{N}_{1}}={F}_{{N}_{2}}=F$。杆3的轴力设为${F}_{{N}_{3}}$。根据力的平衡条件,有:
$$
{F}_{{N}_{1}}\cos\alpha+{F}_{{N}_{2}}\cos\alpha={F}_{{N}_{3}}
$$
即:
$$
2F\cos\alpha={F}_{{N}_{3}}
$$
步骤 3:建立变形协调方程
根据变形协调条件,杆1和杆2的伸长量相等,且等于杆3的伸长量减去δ。设杆1和杆2的伸长量为$\Delta l$,则有:
$$
\Delta l=\frac{F}{E_1A_1}\cdot l
$$
杆3的伸长量为:
$$
\Delta l_3=\frac{{F}_{{N}_{3}}}{E_3A_3}\cdot (l+\delta)
$$
根据变形协调条件,有:
$$
\Delta l=\Delta l_3-\delta
$$
即:
$$
\frac{F}{E_1A_1}\cdot l=\frac{{F}_{{N}_{3}}}{E_3A_3}\cdot (l+\delta)-\delta
$$
步骤 4:求解方程组
将步骤2中的${F}_{{N}_{3}}=2F\cos\alpha$代入步骤3中的变形协调方程,得到:
$$
\frac{F}{E_1A_1}\cdot l=\frac{2F\cos\alpha}{E_3A_3}\cdot (l+\delta)-\delta
$$
解得:
$$
F=\frac{E_1A_1E_3A_3\cos^2\alpha}{2E_1A_1\cos^3\alpha+E_3A_3}\cdot\frac{\delta}{l}
$$
因此,杆1和杆2的轴力为:
$$
{F}_{{N}_{1}}={F}_{{N}_{2}}=F=\frac{E_1A_1E_3A_3\cos^2\alpha}{2E_1A_1\cos^3\alpha+E_3A_3}\cdot\frac{\delta}{l}
$$
杆3的轴力为:
$$
{F}_{{N}_{3}}=2F\cos\alpha=\frac{2E_1A_1E_3A_3\cos^3\alpha}{2E_1A_1\cos^3\alpha+E_3A_3}\cdot\frac{\delta}{l}
$$