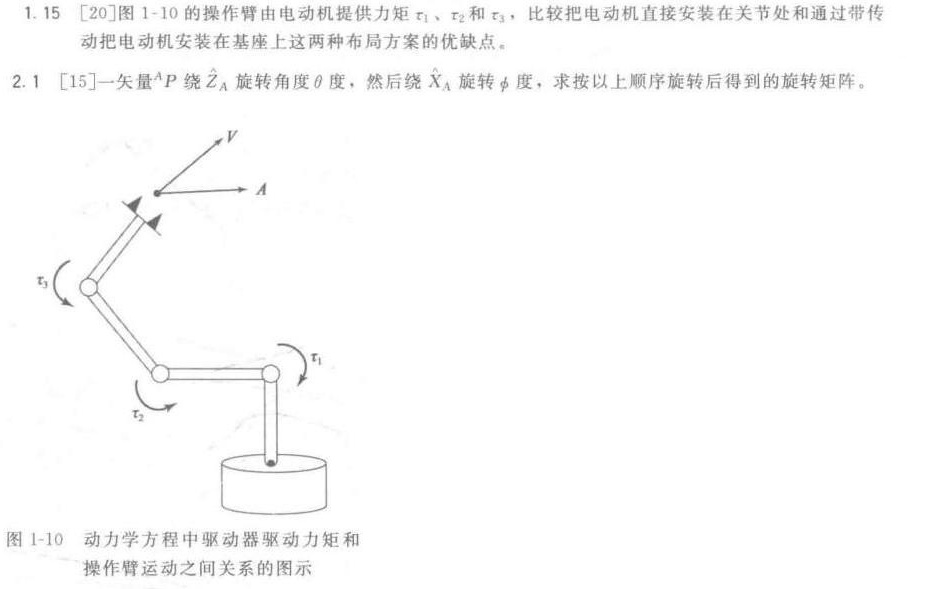
1.15 [20]图 1-10 的操作臂由电动机提供力矩t1、r2和r3,比较把电动机直接安装在关节处和通过带传-|||-动把电动机安装在基座上这两种布局方案的优缺点。-|||-2.1[15]一矢量A P绕ZA旋转角度θ度,然后绕XA旋转ϕ度,求按以上顺序旋转后得到的旋转矩阵。-|||-v-|||-A-|||-t3-|||-2 T1-|||-T2-|||-图 1-10 动力学方程中驱动器驱动力矩和-|||-操作臂运动之间关系的图示
题目解答
答案

解析
考查要点:
本题主要考查旋转矩阵的组合运算,特别是绕不同坐标轴连续旋转时的矩阵乘法顺序及元素推导。需要掌握旋转矩阵的定义、坐标系旋转的顺序对结果的影响,以及矩阵乘法的运算规则。
解题核心思路:
- 明确旋转顺序:题目中先绕ZA轴(z轴)旋转θ,再绕XA轴(x轴)旋转φ,因此旋转矩阵应为先绕z轴旋转,再绕x轴旋转的矩阵乘积。
- 分步推导矩阵:分别写出绕z轴和绕x轴的旋转矩阵,再按顺序相乘,注意矩阵乘法的顺序(先旋转的矩阵在后)。
- 逐元素计算:通过矩阵乘法逐元素展开,结合三角函数公式化简结果。
旋转矩阵的定义
- 绕z轴旋转θ的矩阵:
$ROT(z, \theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix}$ - 绕x轴旋转φ的矩阵:
$ROT(x, \phi) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos\phi & -\sin\phi \\ 0 & \sin\phi & \cos\phi \end{bmatrix}$
矩阵乘法顺序
由于旋转顺序为先绕z轴,再绕x轴,最终旋转矩阵为:
$R = ROT(x, \phi) \cdot ROT(z, \theta)$
逐元素计算
将两个矩阵相乘,结果如下:
$R =
\begin{bmatrix} 1 \cdot \cos\theta + 0 \cdot \sin\theta + 0 \cdot 0 & 1 \cdot (-\sin\theta) + 0 \cdot \cos\theta + 0 \cdot 0 & 0 \\ 0 \cdot \cos\theta + \cos\phi \cdot \sin\theta + (-\sin\phi) \cdot 0 & 0 \cdot (-\sin\theta) + \cos\phi \cdot \cos\theta + (-\sin\phi) \cdot 0 & -\sin\phi \\ 0 \cdot \cos\theta + \sin\phi \cdot \sin\theta + \cos\phi \cdot 0 & 0 \cdot (-\sin\theta) + \sin\phi \cdot \cos\theta + \cos\phi \cdot 0 & \cos\phi \end{bmatrix}$
化简结果
整理后得到:
$R =
\begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \cos\phi \sin\theta & \cos\phi \cos\theta & -\sin\phi \\ \sin\phi \sin\theta & \sin\phi \cos\theta & \cos\phi \end{bmatrix}$