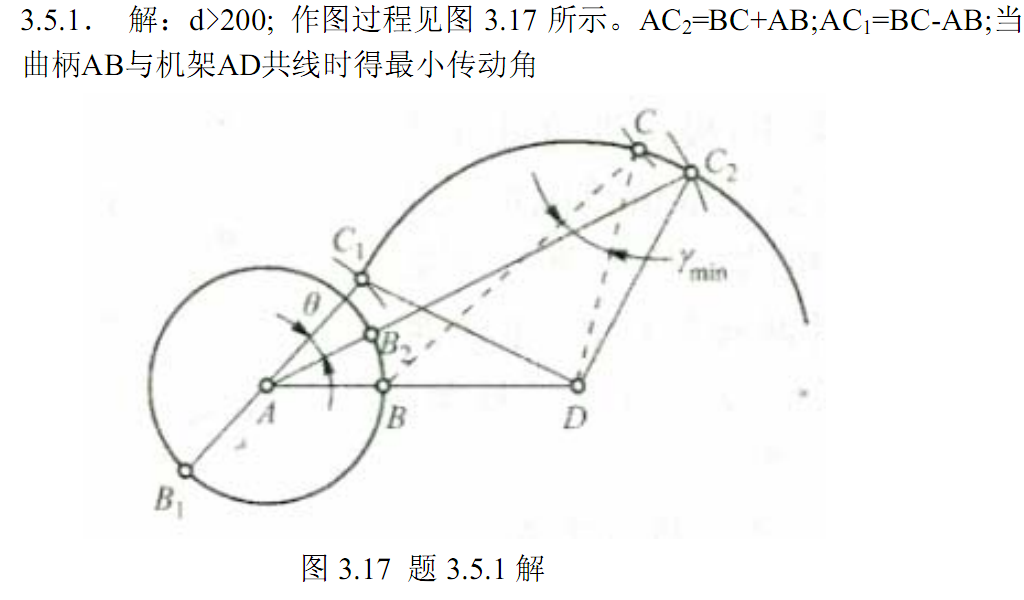
第 3 章 平面连杆机构3.1 填空题3.1.1 在铰链四杆机构中,当最短杆和最长杆长度之和大于其他两杆长度之和时,只能获得双摇杆机构3.1.2 在摆动导杆机构中,导杆摆角为 30°,则行程速比系数的值为 1.4 。3.1.3 曲柄摇杆机构,当以摇杆为原动件时有死点位置存在。3.1.4 曲柄滑块机构,当偏距值为零时没有急回特性3.1.5 在曲柄滑块机构中,当以滑块为原动件时有死点存在。3.1.6 在曲柄滑块机构中,若曲柄长 20,偏距 10,连杆长 60,则该机构的最大压力角30°3.1.7 对心曲柄滑块机构曲柄长为a,连杆长为b,则最小传动角γmin 等于(90-arcsin(a/b))度,它出现在曲柄与滑块导路垂直的两位置。3.2 判断题3.2.1.偏距为零的曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。(√ )3.2.2.在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;而取导杆为原动件时,则机构有两个死点位置.( √ )3.2.3.在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。(√)3.2.4.在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。(×)3.2.5.铰链四杆机构是由平面低副组成的四杆机构。(√ )3.2.6.任何平面四杆机构出现死点时,都是不利的,因此应设法避免。(×)3.2.7.平面四杆机构有无急回特性取决于极位夹角是否大于零。(√ )3.2.8.在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角可能出现在曲柄与机架两个共线位置之一处。( √ )3.2.9.在偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角γ min 可能出现在曲柄与机架(即滑块的导路)相平行的位置。(×)3.2.10.摆动导杆机构不存在急回特性。(×)3.2.11.增大构件的惯性,是机构通过死点位置的唯一办法。(√)3.2.12.平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角。(×)3.2.13.双摇杆机构不会出现死点位置。(×)3.2.14.凡曲柄摇杆机构,极位夹角必不等于 0,故它总具有急回特征。(×)3.2.15.曲柄摇杆机构只能将回转运动转换为往复摆动。(×)3.2.16.在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。( × )3.2.17.在单缸燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。(×)3.2.18.当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。(√)3.2.19.杆长不等的双曲柄机构无死点位置。(√)3.2.20.在转动导杆机构中,不论取曲柄或导杆为原动件,机构均无死点位置。(√)3.3 选择题3.3.1.连杆机构行程速比系数是指从动杆反、正行程A. 瞬时速度的比值;( B. 最大速度的比值;( C. 平均速度的比值。 D. 3.3.2.平行四杆机构工作时,其传动角。 E. 始终保持为90o ;( F. 始终是0o ;( G. 是变化值。 x 为 30° 45° 90° 3.3.4.设计连杆机构时,为了具有良好的传动条件,应使。 传动角大一些,压力角小一些;( 传动角和压力角都小一些;( 传动角和压力角都大一些。 3.3.5.在曲柄摇杆机构中,当摇杆为主动件,且处于共线位置时,机构处于死点位置。 曲柄与机架;( 曲柄与连杆;( 连杆与摇杆。 3.3.6.在摆动导杆机构中,当曲柄为主动件时,其传动角变化的。 是由小到大;( 是由大到小;( 是不。 3.3.7.在曲柄摇杆机构中,当曲柄为主动件,且共线时,其传动角为最小值。 曲柄与连杆;( 曲柄与机架;( 摇杆与机架。 3.3.8.压力角是在不考虑摩擦情况下作用力和力作用点的方向所夹的锐角。 法线;( 速度;( 加速度;( 切线。 3.3.9.为使机构具有急回运动,要求行程速比系数 K=1;( K>1;( K<1。 3.3.10.铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到机构。 曲柄摇杆;( 双曲柄;( 双摇杆。 3.3.11.双曲柄机构死点。 存在;( 可能存在;( 不存在。 3.3.12.对于双摇杆机构,如取不同构件为机架,使其成为曲柄摇杆机构。 一定;( 有可能;( 不能。 3.5 作图与计算 =100mm,最长杆 =300mm, 为原动件,用作图法求该机构的最小传动角γ min 的大小。 3)该机构是否有 急回特性,如果有画出极位夹角 图 3.2 题 3.5.1 图 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 B=20mm,偏心距 e=15mm,其最大压力角α=30° 。试用作图法确定连杆长度 C,滑块的最大行程 H,并标明其极位夹角θ,求出其行程速度变化系数 K。 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 K。(2)最小传动角γ min 的大小。(3)滑块 3 往复运动时向左的平均速度大还是向右的平均速度大。(4)当滑块 3 为主动时,机构是否出现死点,为什么?(尺寸在图中量取) 图 3.3 题 3.5.3 图 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 3.5.4.画出图 3.4 中各个机构的极位夹角 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 图 3.4 题 3.5.4 图 解:见图 3.20 作出 B,Q 点的圆轨迹,再作两圆外公切线得从动件两极限位置,从而得极位夹角。 的圆轨迹,再自 作圆的两条切线得从动件两极限位置,从而得极位夹角。 的圆轨迹,再自 作圆的两条切线得从动件两极限位置,从而得极位夹角。 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 3.5.5.画出图 3.5 中各个机构的在图示位置的压力角 图 3.5 题 3.5.5 图 解:见图 3.21 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 LBC=50,LCD=35,LAD=30,AD为机架, 问: B为曲柄,求LAB的最大值 LAB的最小值 LAB的数值围 图 3.6 题 3.5.6 图 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解 B 和机架 AD 拉成一直线时为起始位置,曲柄逆时针转过ϕ= 143°时,摇杆摆动到左极限位置。已知摇杆的行程速比系数为 k=1.12,摇杆 CD 长为 50mm,机架 AD 长为75mm,求:用作图法确定曲柄和连杆的长度。 图 3.7 题 3.5.7 图 3.5.1.解: gt 200; 作图过程见图3.17所示。 (C)_(2)=BC+AB (C)_(1)=BC-AB; 当-|||-曲柄AB与机架AD共线时得最小传动角-|||-C-|||-p C2-|||-C1-|||-t min-|||-θ-|||-B 1-|||-A B D-|||-一-|||-B1-|||-图3.17题3.5.1解
第 3 章 平面连杆机构
3.1 填空题
3.1.1 在铰链四杆机构中,当最短杆和最长杆长度之和大于其他两杆长度之和时,只能获得
双摇杆机构
3.1.2 在摆动导杆机构中,导杆摆角为 30°,则行程速比系数的值为 1.4 。
3.1.3 曲柄摇杆机构,当以摇杆为原动件时有死点位置存在。
3.1.4 曲柄滑块机构,当偏距值为零时没有急回特性
3.1.5 在曲柄滑块机构中,当以滑块为原动件时有死点存在。
3.1.6 在曲柄滑块机构中,若曲柄长 20,偏距 10,连杆长 60,则该机构的最大压力角30°
3.1.7 对心曲柄滑块机构曲柄长为a,连杆长为b,则最小传动角γmin 等于(90-arcsin(a/b))度,它出现在曲柄与滑块导路垂直的两位置。
3.2 判断题
3.2.1.偏距为零的曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。(√ )
3.2.2.在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;而取导杆为原动件时,则机构有两个死点位置.( √ )
3.2.3.在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。(√)
3.2.4.在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。(×)
3.2.5.铰链四杆机构是由平面低副组成的四杆机构。(√ )
3.2.6.任何平面四杆机构出现死点时,都是不利的,因此应设法避免。(×)
3.2.7.平面四杆机构有无急回特性取决于极位夹角是否大于零。(√ )
3.2.8.在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角可能出现在曲柄与机架两个共线位置之一处。( √ )
3.2.9.在偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角γ min 可能出现在曲柄与机架(即滑块的导路)相平行的位置。(×)
3.2.10.摆动导杆机构不存在急回特性。(×)
3.2.11.增大构件的惯性,是机构通过死点位置的唯一办法。(√)
3.2.12.平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角。(×)
3.2.13.双摇杆机构不会出现死点位置。(×)
3.2.14.凡曲柄摇杆机构,极位夹角必不等于 0,故它总具有急回特征。(×)
3.2.15.曲柄摇杆机构只能将回转运动转换为往复摆动。(×)
3.2.16.在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。( × )
3.2.17.在单缸燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。(×)
3.2.18.当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。(√)
3.2.19.杆长不等的双曲柄机构无死点位置。(√)
3.2.20.在转动导杆机构中,不论取曲柄或导杆为原动件,机构均无死点位置。(√)
3.3 选择题
3.3.1.连杆机构行程速比系数是指从动杆反、正行程
A. 瞬时速度的比值;(B. 最大速度的比值;(
C. 平均速度的比值。
D. 3.3.2.平行四杆机构工作时,其传动角。
E. 始终保持为90o ;(
F. 始终是0o ;(
G. 是变化值。
x 为
30°
45°
90°
3.3.4.设计连杆机构时,为了具有良好的传动条件,应使。
传动角大一些,压力角小一些;(
传动角和压力角都小一些;(
传动角和压力角都大一些。
3.3.5.在曲柄摇杆机构中,当摇杆为主动件,且处于共线位置时,机构处于死点位置。
曲柄与机架;(
曲柄与连杆;(
连杆与摇杆。
3.3.6.在摆动导杆机构中,当曲柄为主动件时,其传动角变化的。
是由小到大;(
是由大到小;(
是不。
3.3.7.在曲柄摇杆机构中,当曲柄为主动件,且共线时,其传动角为最小值。
曲柄与连杆;(
曲柄与机架;(
摇杆与机架。
3.3.8.压力角是在不考虑摩擦情况下作用力和力作用点的方向所夹的锐角。
法线;(
速度;(
加速度;(
切线。
3.3.9.为使机构具有急回运动,要求行程速比系数
K=1;(
K>1;(
K<1。
3.3.10.铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到机构。
曲柄摇杆;(
双曲柄;(
双摇杆。
3.3.11.双曲柄机构死点。
存在;(
可能存在;(
不存在。
3.3.12.对于双摇杆机构,如取不同构件为机架,使其成为曲柄摇杆机构。
一定;(
有可能;(
不能。
3.5 作图与计算
=100mm,最长杆
=300mm,
为原动件,用作图法求该机构的最小传动角γ min 的大小。 3)该机构是否有
急回特性,如果有画出极位夹角
图 3.2 题 3.5.1 图
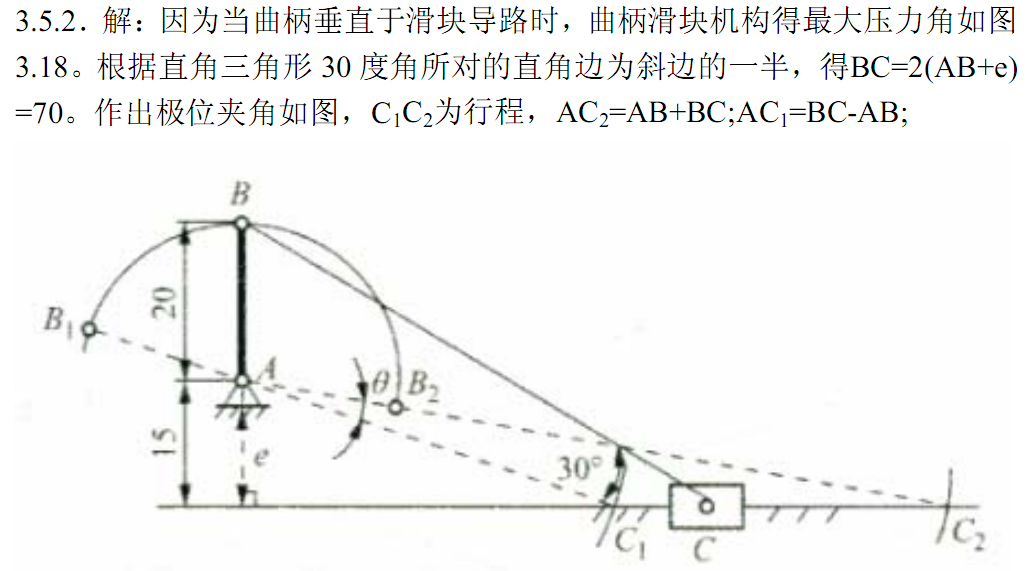
B=20mm,偏心距 e=15mm,其最大压力角α=30° 。试用作图法确定连杆长度
C,滑块的最大行程 H,并标明其极位夹角θ,求出其行程速度变化系数 K。
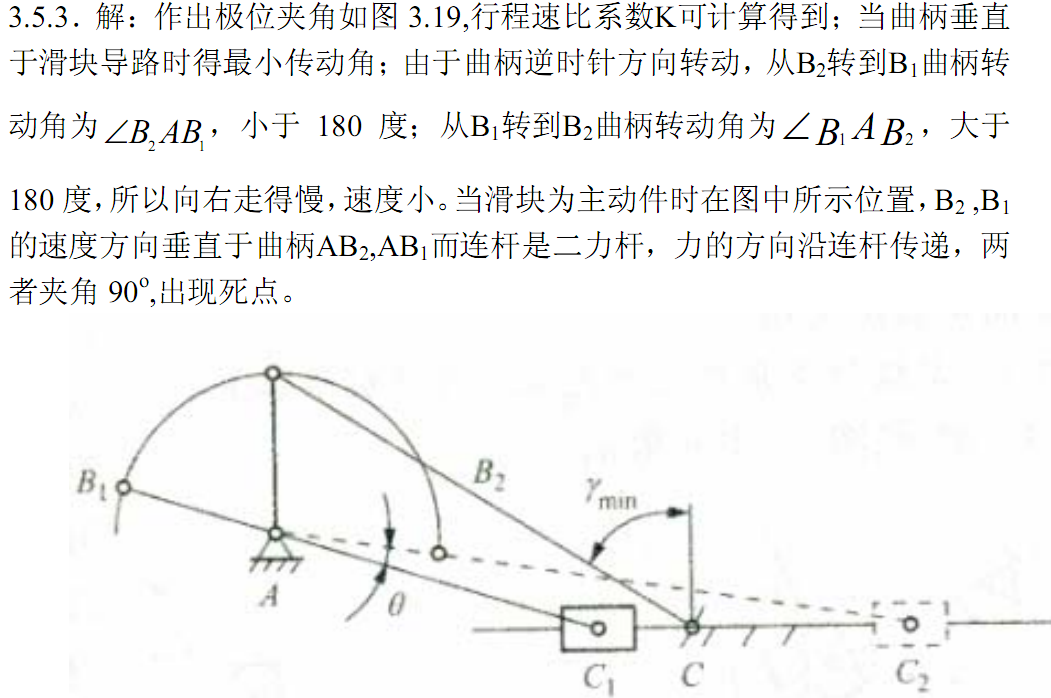
K。(2)最小传动角γ min 的大小。(3)滑块 3 往复运动时向左的平均速度大还是向右的平均速度大。(4)当滑块 3 为主动时,机构是否出现死点,为什么?(尺寸在图中量取)
图 3.3 题 3.5.3 图
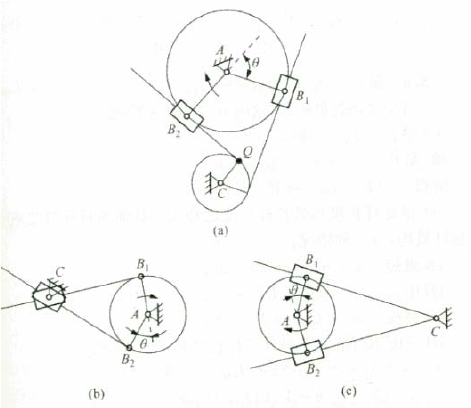
3.5.4.画出图 3.4 中各个机构的极位夹角
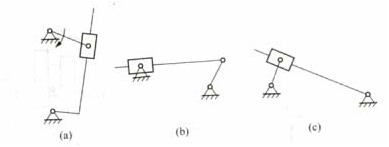
图 3.4 题 3.5.4 图
解:见图 3.20
作出 B,Q 点的圆轨迹,再作两圆外公切线得从动件两极限位置,从而得极位夹角。
的圆轨迹,再自
作圆的两条切线得从动件两极限位置,从而得极位夹角。
的圆轨迹,再自
作圆的两条切线得从动件两极限位置,从而得极位夹角。
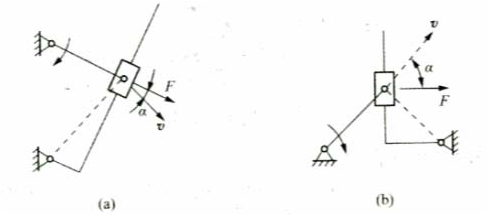
3.5.5.画出图 3.5 中各个机构的在图示位置的压力角
图 3.5 题 3.5.5 图
解:见图 3.21
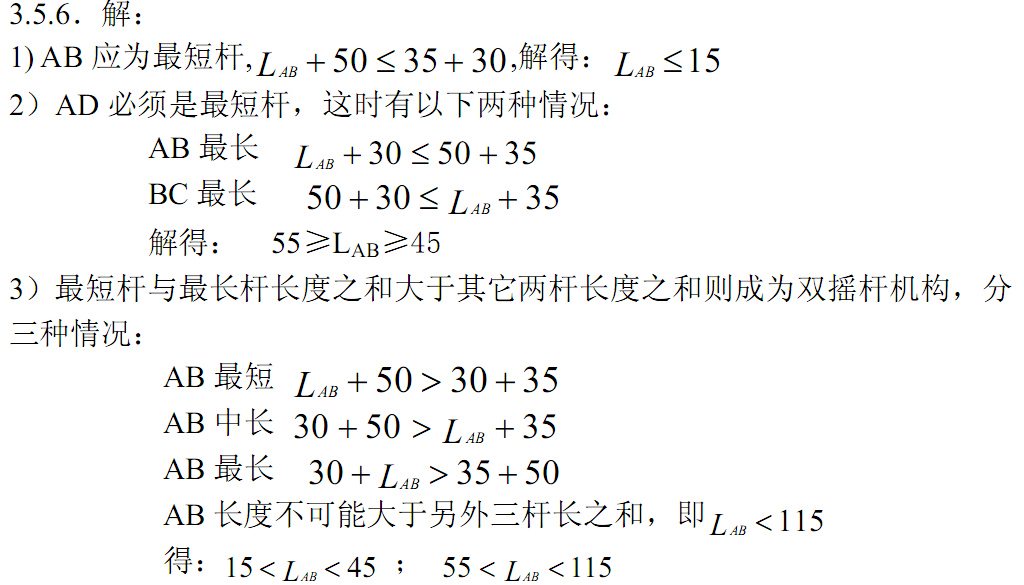
LBC=50,LCD=35,LAD=30,AD为机架,
问:
B为曲柄,求LAB的最大值
LAB的最小值
LAB的数值围
图 3.6 题 3.5.6 图
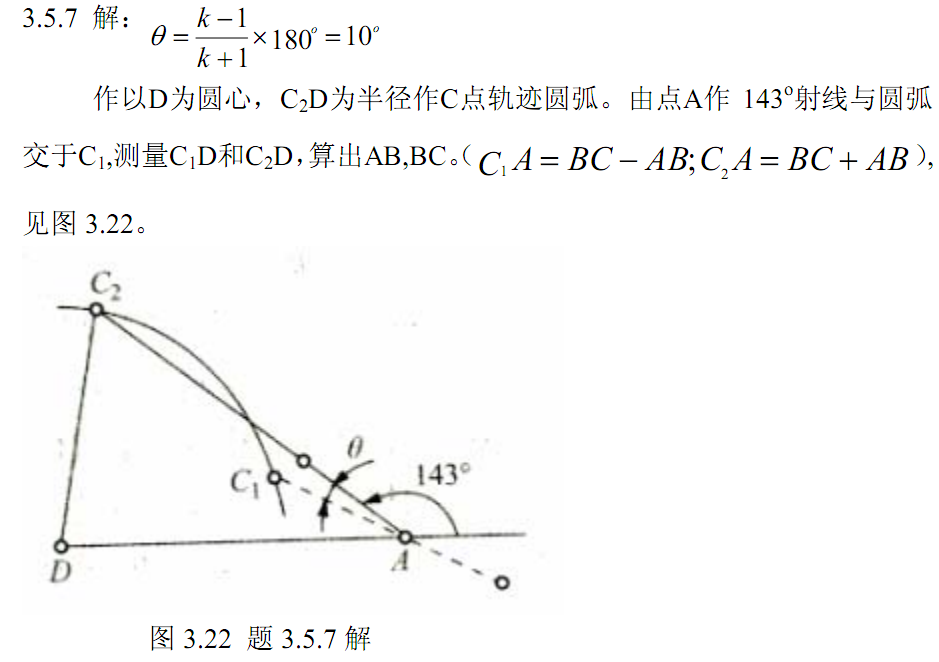
B 和机架 AD 拉成一直线时为起始位置,曲柄逆时针转过ϕ= 143°时,摇杆摆动到左极限位置。已知摇杆的行程速比系数为 k=1.12,摇杆 CD 长为 50mm,机架 AD 长为75mm,求:用作图法确定曲柄和连杆的长度。
图 3.7 题 3.5.7 图
题目解答
答案
中,已知L BC =50,L CD =35,L AD =30,AD为机架, 问: 1) 若此机构为曲柄摇杆机构,且AB为曲柄,求L AB 的最大值 2) 若此机构为双曲柄机构,求L AB 的最小值 3) 若此机构为双摇杆机构,求L AB 的数值围