题目
如图所示所有机构中,原动件数目均为1时,判断图示机构是否有确定的运动。如有局部自由度、复合铰链和虚约束请予以指出。 D ! 北B-|||-E B-|||-8 B-|||-c-|||-H-|||-7 b-|||-非 AB=BC=CD=DA-|||-(a) (b) (c)-|||-c B-|||-B-|||-A-|||-c-|||-(d) (e)
如图所示所有机构中,原动件数目均为1时,判断图示机构是否有确定的运动。如有局部自由度、复合铰链和虚约束请予以指出。 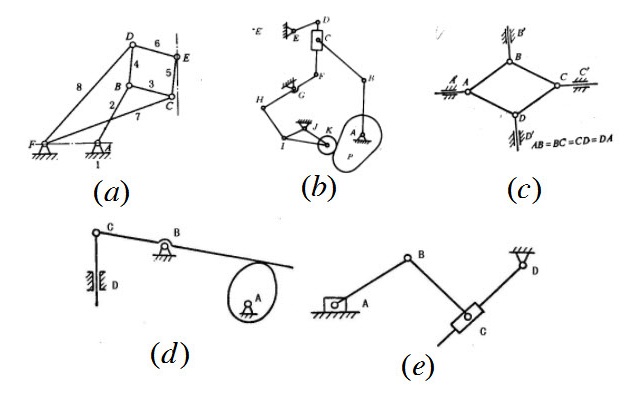
题目解答
答案
解析
步骤 1:计算自由度
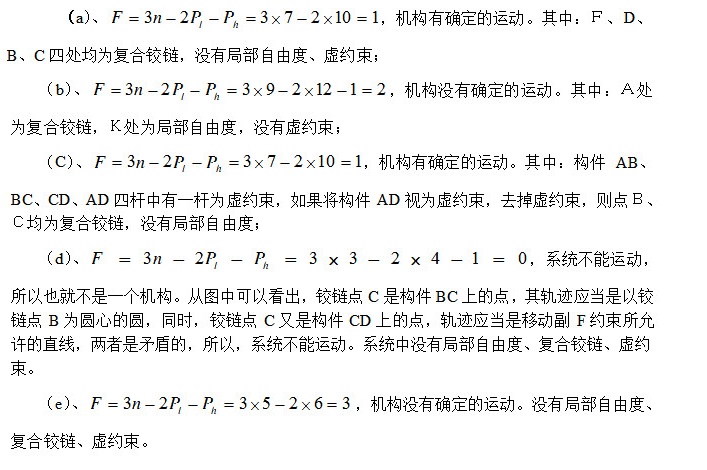
对于每个机构,我们首先计算其自由度。自由度的计算公式为:$F=3n-2{P}_{1}-{P}_{n}$,其中$n$是活动构件的数目,${P}_{1}$是低副的数目,${P}_{n}$是高副的数目。
步骤 2:判断机构是否有确定的运动
如果自由度$F$等于原动件数目,则机构有确定的运动;如果$F$大于原动件数目,则机构没有确定的运动;如果$F$小于原动件数目,则机构不能运动。
步骤 3:识别局部自由度、复合铰链和虚约束
局部自由度是指不影响整个机构运动的自由度;复合铰链是指两个或两个以上构件在同一点构成的铰链;虚约束是指在机构中不起独立限制作用的约束。
对于每个机构,我们首先计算其自由度。自由度的计算公式为:$F=3n-2{P}_{1}-{P}_{n}$,其中$n$是活动构件的数目,${P}_{1}$是低副的数目,${P}_{n}$是高副的数目。
步骤 2:判断机构是否有确定的运动
如果自由度$F$等于原动件数目,则机构有确定的运动;如果$F$大于原动件数目,则机构没有确定的运动;如果$F$小于原动件数目,则机构不能运动。
步骤 3:识别局部自由度、复合铰链和虚约束
局部自由度是指不影响整个机构运动的自由度;复合铰链是指两个或两个以上构件在同一点构成的铰链;虚约束是指在机构中不起独立限制作用的约束。