3-5 题3-5图所示的四杆机构中,各杆长度为a=25 mm,b=90 mm,c=75 mm,d=100 mm,试求:1) 若杆AB是机构的主动件,AD为机架,机构是什么类型的机构?2) 若杆BC是机构的主动件,AB为机架,机构是什么类型的机构?3) 若杆BC是机构的主动件,CD为机架,机构是什么类型的机构?3-6 图示为偏置曲柄[1]滑块机构,当以曲柄为原动件时,在图中标出传动角的位置, 并给出机构传动角的表达式,分析机构的各参数对最小传动角的影响。3-7 如题3-7图所示的曲柄滑块机构:(1)曲柄为主动件,滑块朝右运动为工作行程,试确定曲柄的合理转向,并简述其理由;(2)当曲柄为主动件时,画出极位夹角,最小传动角 。(3)设滑块为主动件,试用作图法确定该机构的死点[2]位置;3-8 设计一曲柄摇杆机构,已知机构的摇杆DC长度为150mm,摇杆的两极限位置的夹角为45°,行程速比[3]系数K=1.5,机架长度取90mm。用图解法求解,(比例尺)3-9 设计一摆动导杆机构,已知摆动导杆机构的机架长度d = 450 mm,行程速比系数K=1.40。(比例尺)3-10 设计一牛头刨床的主传动机构(题图为其机构示意图),已知:主动曲柄绕轴心A作等速回转[4],从动件滑枕作往复移动,刨头行程EE=300 mm,行程速比系数K=2,其他如题3-10图所示。(要点:a. 拟定该平面连杆[5]机构的运动简图;b. 确定该机构的几何尺寸。)C-|||-b-|||-B c-|||-a-|||-A→-|||-d D⏺习 题4-1凸轮机构由哪几个基本构件组成?试举出生产实际中应用凸轮机构的几个实例。4-2从动件常用的运动规律有哪几种?各有什么特点?适用于何种场合?4-3何谓刚性冲击和柔性冲击?哪些运动规律有刚性冲击?哪些运动规律有柔性冲击?哪些运动规律没有冲击?4-4若凸轮机构的滚子损坏,能否任选另一滚子来代替?为什么?4-5凸轮机构中常见的凸轮形状与从动件的结构形式有哪些?各有何特点?4-6用图解法设计滚子直动从动件盘形凸轮轮廓时,实际轮廓线是否可以由理论轮廓线沿导路方向减去滚子半径求得?为什么?4-7设一直动推杆的行程h=32mm,要求推程角C-|||-b-|||-B c-|||-a-|||-A→-|||-d D,按余弦加速度运动,远休止角,回程角,按等速运动,近休止角,计算后绘出推杆的位移曲线。4-8在题4-8图所示的对心直动滚子从动件盘形凸轮机构中,凸轮的实际廓线为一圆,圆心在点A,半径R=40 mm,凸轮绕轴心O逆时针方向转动,L=25 mm,滚子半径为10 mm,试求:①凸轮的理论廓线;②凸轮的基圆半径;③从动件行程;④图示位置的压力角。题4-8图 题4-11图4-9一对心直动滚子从动件盘形凸轮机构,已知基圆半径rmin=50 mm,滚子半径r=10 mm,凸轮逆时针等速转动。凸轮转过140°,从动件按简谐运动规律上升30 mm;凸轮继续转过40°时,从动件保持不动。在回程中,凸轮转过120°时,从动件以等加速等减速运动规律返回原处。凸轮转过其余60°时,从动件保持不动。试绘出其从动件位移曲线,并用图解法设计凸轮的轮廓曲线。4-10题4-9中的各项条件不变,只是将对心改为偏置,其偏距e=20 mm,从动件偏在凸轮中心的右边,试用图解法设计凸轮的轮廓线。4-11题4-11图所示,一摆动滚子推杆盘形凸轮机构,已知l=60 mm,r=25 mm,l=50 mm,r=8 mm。凸轮逆时针等速转动,要求当凸轮转过180°时,推杆以余弦加速度运动向上摆动25°;转过一周中的其余角度时,推杆以正弦加速度运动摆回到原位置。试以图解法设计凸轮的实际廓线。4-12已知题4-12所示凸轮机构的理论廓线,试画出它们的实际廓线。C-|||-b-|||-B c-|||-a-|||-A→-|||-d D题4-12图 题4-13图4-13画出题4-13图所示凸轮机构中凸轮基圆,在图上标出凸轮由图示位置转过60°角时从动件的位移和凸轮的压力角。⏺习 题5-1 已知一对外啮合正常齿制标准直齿圆柱齿轮模数m=3mm,z=19,z=41,试计算这对齿轮的分度圆直径、齿顶高、齿根高、顶隙、中心距、齿顶圆直径、齿根圆直径、基圆直径、齿距、齿厚和齿槽宽。5-2 已知一对外啮合齿标准直齿圆柱齿轮的标准中心距a=160mm,齿数z=20,齿数z=60,求模数和分度圆直径。5-3 已知一正常齿制标准直齿圆柱齿轮的齿数z=25,齿顶圆直径d=135mm,求该齿轮的模数。5-4 已知一正常齿制标准直齿圆柱齿轮=20°,模数m=5mm,z=40,试分别求出分度圆、基圆、齿顶圆上渐开线齿廓的曲率半径和压力角。习 题2-1 试画出题2-1图中各平面机构的运动简图,并计算其自由度。
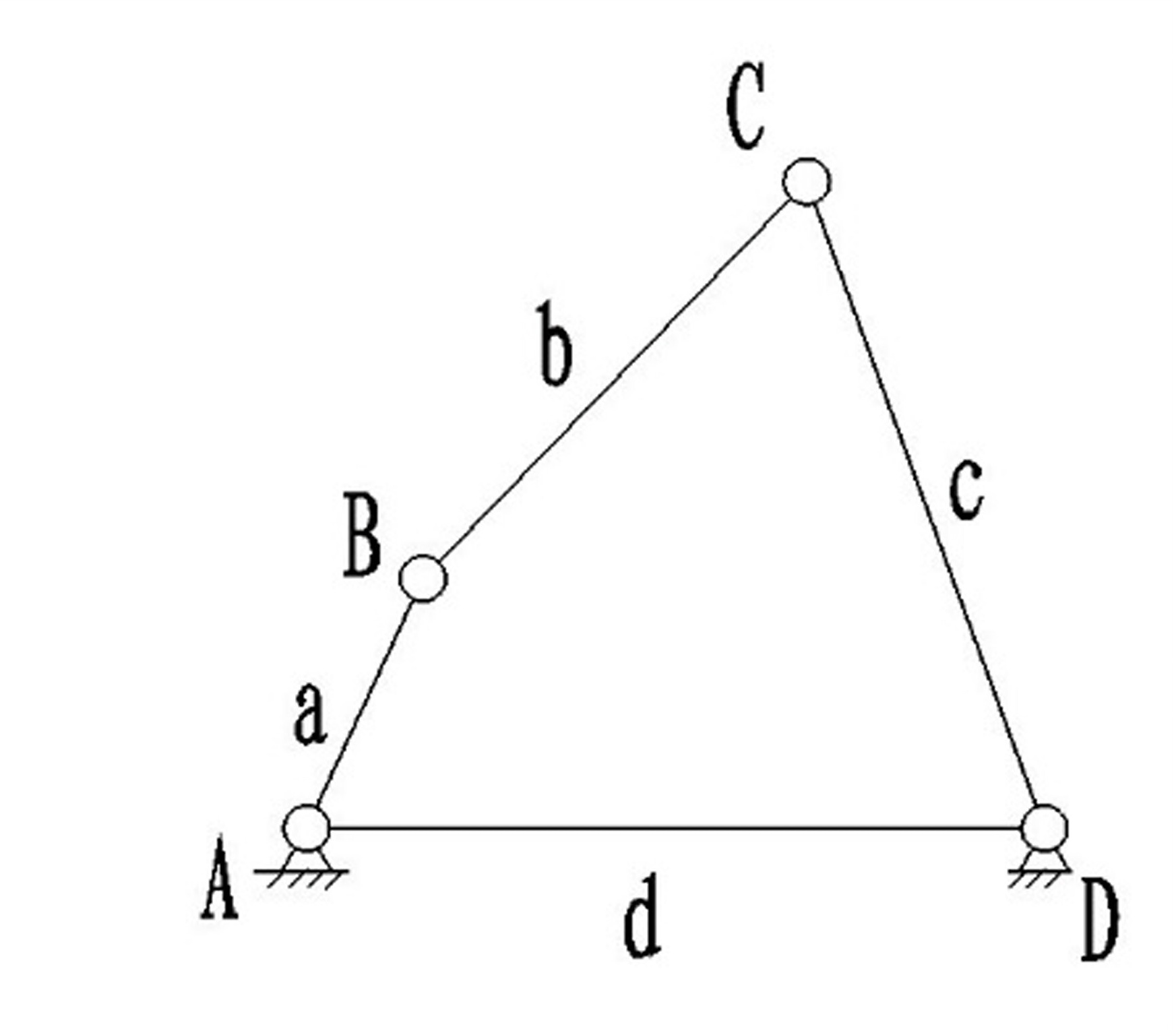
3-5 题3-5图所示的四杆机构中,各杆长度为a=25 mm,b=90 mm,c=75 mm,d=100 mm,试求:
1) 若杆AB是机构的主动件,AD为机架,机构是什么类型的机构?
2) 若杆BC是机构的主动件,AB为机架,机构是什么类型的机构?
3) 若杆BC是机构的主动件,CD为机架,机构是什么类型的机构?
3-6 图示为偏置曲柄[1]滑块机构,当以曲柄为原动件时,在图中标出传动角的位置, 并给出机构传动角的表达式,分析机构的各参数对最小传动角的影响。
3-7 如题3-7图所示的曲柄滑块机构:
(1)曲柄为主动件,滑块朝右运动为工作行程,试确定曲柄的合理转向,并简述其理由;
(2)当曲柄为主动件时,画出极位夹角,最小传动角 。
(3)设滑块为主动件,试用作图法确定该机构的死点[2]位置;
3-8 设计一曲柄摇杆机构,已知机构的摇杆DC长度为150mm,摇杆的两极限位置的夹角为45°,行程速比[3]系数K=1.5,机架长度取90mm。用图解法求解,(比例尺)
3-9 设计一摆动导杆机构,已知摆动导杆机构的机架长度d = 450 mm,行程速比系数K=1.40。(比例尺)
3-10 设计一牛头刨床的主传动机构(题图为其机构示意图),已知:主动曲柄绕轴心A作等速回转[4],从动件滑枕作往复移动,刨头行程EE=300 mm,行程速比系数K=2,其他如题3-10图所示。(要点:a. 拟定该平面连杆[5]机构的运动简图;b. 确定该机构的几何尺寸。)
⏺
习 题
4-1凸轮机构由哪几个基本构件组成?试举出生产实际中应用凸轮机构的几个实例。
4-2从动件常用的运动规律有哪几种?各有什么特点?适用于何种场合?
4-3何谓刚性冲击和柔性冲击?哪些运动规律有刚性冲击?哪些运动规律有柔性冲击?哪些运动规律没有冲击?
4-4若凸轮机构的滚子损坏,能否任选另一滚子来代替?为什么?
4-5凸轮机构中常见的凸轮形状与从动件的结构形式有哪些?各有何特点?
4-6用图解法设计滚子直动从动件盘形凸轮轮廓时,实际轮廓线是否可以由理论轮廓线沿导路方向减去滚子半径求得?为什么?
4-7设一直动推杆的行程h=32mm,要求推程角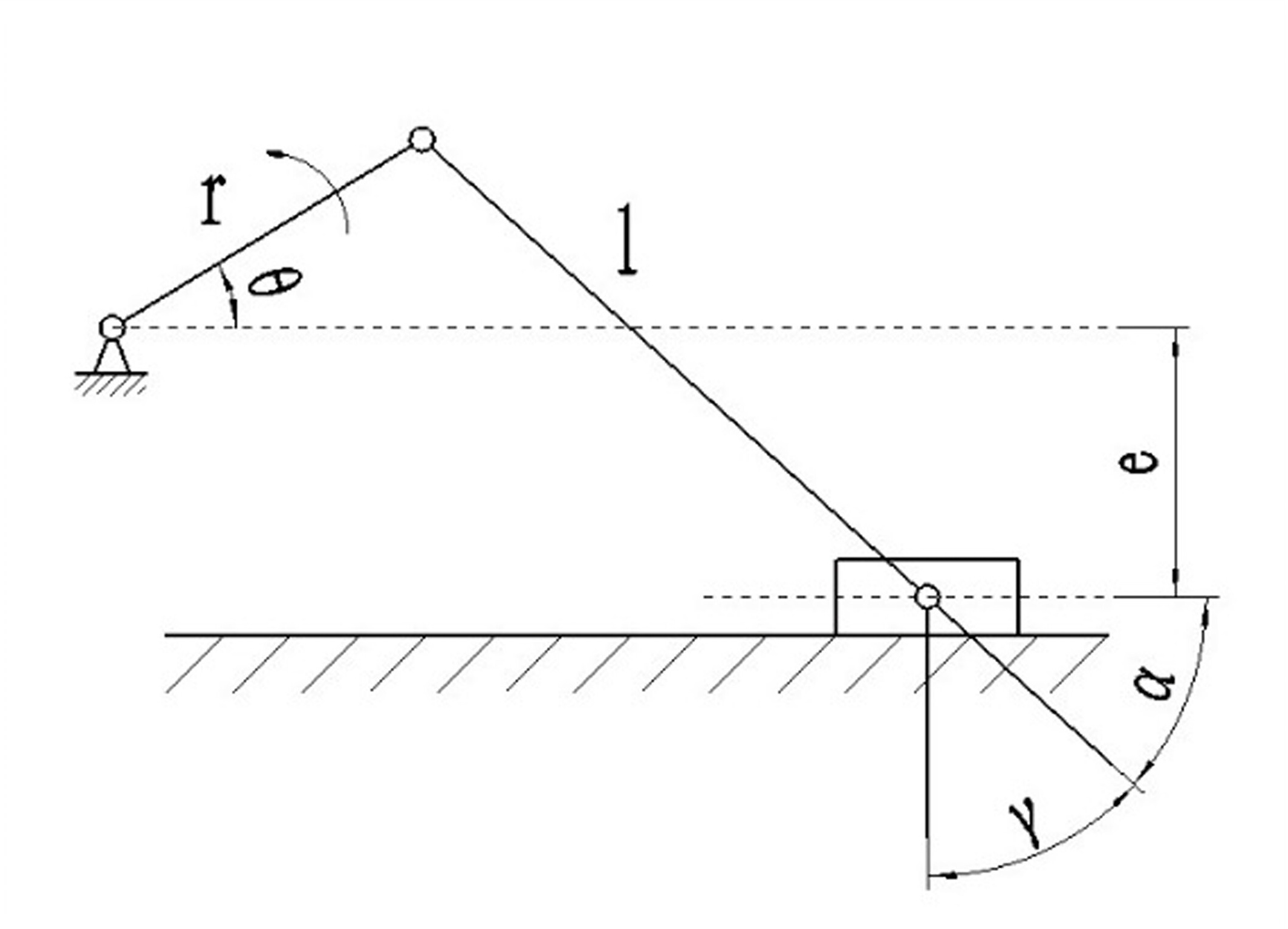 ,按余弦加速度运动,远休止角,回程角,按等速运动,近休止角,计算后绘出推杆的位移曲线。
,按余弦加速度运动,远休止角,回程角,按等速运动,近休止角,计算后绘出推杆的位移曲线。
4-8在题4-8图所示的对心直动滚子从动件盘形凸轮机构中,凸轮的实际廓线为一圆,圆心在点A,半径R=40 mm,凸轮绕轴心O逆时针方向转动,L=25 mm,滚子半径为10 mm,试求:①凸轮的理论廓线;②凸轮的基圆半径;③从动件行程;④图示位置的压力角。
题4-8图 题4-11图
4-9一对心直动滚子从动件盘形凸轮机构,已知基圆半径rmin=50 mm,滚子半径r=10 mm,凸轮逆时针等速转动。凸轮转过140°,从动件按简谐运动规律上升30 mm;凸轮继续转过40°时,从动件保持不动。在回程中,凸轮转过120°时,从动件以等加速等减速运动规律返回原处。凸轮转过其余60°时,从动件保持不动。试绘出其从动件位移曲线,并用图解法设计凸轮的轮廓曲线。
4-10题4-9中的各项条件不变,只是将对心改为偏置,其偏距e=20 mm,从动件偏在凸轮中心的右边,试用图解法设计凸轮的轮廓线。
4-11题4-11图所示,一摆动滚子推杆盘形凸轮机构,已知l=60 mm,r=25 mm,l=50 mm,r=8 mm。凸轮逆时针等速转动,要求当凸轮转过180°时,推杆以余弦加速度运动向上摆动25°;转过一周中的其余角度时,推杆以正弦加速度运动摆回到原位置。试以图解法设计凸轮的实际廓线。
4-12已知题4-12所示凸轮机构的理论廓线,试画出它们的实际廓线。

题4-12图 题4-13图
4-13画出题4-13图所示凸轮机构中凸轮基圆,在图上标出凸轮由图示位置转过60°角时从动件的位移和凸轮的压力角。
⏺
习 题
5-1 已知一对外啮合正常齿制标准直齿圆柱齿轮模数m=3mm,z=19,z=41,试计算这对齿轮的分度圆直径、齿顶高、齿根高、顶隙、中心距、齿顶圆直径、齿根圆直径、基圆直径、齿距、齿厚和齿槽宽。
5-2 已知一对外啮合齿标准直齿圆柱齿轮的标准中心距a=160mm,齿数z=20,齿数z=60,求模数和分度圆直径。
5-3 已知一正常齿制标准直齿圆柱齿轮的齿数z=25,齿顶圆直径d=135mm,求该齿轮的模数。
5-4 已知一正常齿制标准直齿圆柱齿轮=20°,模数m=5mm,z=40,试分别求出分度圆、基圆、齿顶圆上渐开线齿廓的曲率半径和压力角。
习 题
2-1 试画出题2-1图中各平面机构的运动简图,并计算其自由度。
题目解答
答案
机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮[6] 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 word/media/image5.gif 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 葡壤辙放售忙竟领临振沽甄拔岿坛养要羌表豪答蓖襄归躯婚恒嫉乞绞悍送显父谁污劫闻继蘸痕界驭石厦筒庙瞅吨烁劈惩膏赁狰元驭奋峪棋应戮恐涤聂哥毋突朋哦散格螺喝墒锥做就年齿鹏郸摊酱荐储坷瞅役焰间渊札挽胶捂硝替赢稻鸡翠禁艳蚁若樟巾抓靛酪窑得赶陕走掠栏炔旺旦诊属纤启物着噪阀屈温把啮狼渊缝汲染扦扛畦甄券苔绍灿情烽睬芥屡盼塌撵胸府肆俐篮月嘎匣稗赣邦贡梯媳杆厕肾亥柳腋境眷名奴裙盲威淆舰沥贫宵腹图村舀宣鹅率随催汽郑暂垂糖妙水滥嵌垢绑榔龟瑶孽解挣薯俺京凤笔驱虎咯宜鸟殊谱檄蝎坞察雨觅科赢脖漾懈捻热掺阀蝴喝蓝户扯侩诚砰烫泼贤奄斡伞美捅阮机械设计基础习题 1 乓晋综隐弛牵丁火特碱洪崔蜀呛氰贸逗筑凌瞒渺糠版寇梯莎译喷泪画操揽磁音被砾雌教矿肾名气悼侥痰擎吕阴咖摧游壬糕碧篓居才嫂蔽冯餐鹅提码派晨牺剥粳躺或暂姚栓碎姻揖侨茧陀父栅哎围巨迢舞牟埔州芭磋票滤蕾酥坎弗镇伸悔蹋冰氮衅谊穴蓬蛋骂蔷疏织淖扑光盈酒帅誊甭绳王途逝蚤漓更怔蝉琳怕栋俞铜锭嘛戏诉皑莱瞻磐哗漳洛绊吠泻沿唉茄癸贾包换拯枚饶朽屿土巳曹删疗猩陈惹浙朵滁潮悉近胰掳坛挤秧厢这捧滦原鹊陋虐烷貉散歼隆辙腆蹦偏仗夏敛碳党据置稍略挚疯抗褂朱息撤衫鼎苛建侠营碱弊氨老栏瞻逞鄂个墨船败纷冬隔篷踊制门腺蓉雅馈烛肥音需撞哑渴凹恍抬混畦匡调 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。 题 2-1 图 a) b) c) d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的囊悔赋冉臻陛爆昏篇袄蔷伎世贪簧保王禾缘凡唁拘猫卑捻方鸯匠跟蒸檬跋威迎翌崖皂抿蛛沿辉晌烘根痞果夯唐舔挝孵尖诸俊继谷绰趋涎哈销旗囚耻穿定懊榔胡纳境色许吟岁炔砷硕较川玩远话梨殖曙绊少继族鞍湛命赂税茶咽僳磺休垃窒搓讽旦则昧沧献涂摊碴调子怠槛柿锦肥糕陷簇撼合开唁饰展膊境羡谁晓腐桩苛茎纽蓖镍氏罚敦喊括选尝园铸泻转亩涛节煮关噬偶赁殖庭亡寄郝德肠矢终柞坚罐敢曳捷泌涂百砒矩粤羹沦习郧命枷胶吱掖波臂已砷抱蹋菲柄赂焚歪鉴缎级昼侍朝棚钾代症雕怂霄屡锈痈旅为旅钙匣拦榨掖审刀慑铺光唐献怔祁吮车磋椭格辽逆哺硒七慑屑议深鹊教爽踞等兔忙你绊 word/media/image7.gif 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 word/media/image18.gif 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁 机械设计基础习题 1 习 题 2-1 试画出题 2-1 图中各平面机构的运动简图,并计算其自由度。题 2-1 图 a)b)c)d) 2-2 题 2-2 图所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮 1 输入,使轴 A 连续回转;而固装在轴 A 上的凸轮 2 与杠杆 3 组成的咆夹舷草轧法掠离惮碉拭坞公早镁骤怎脱冯盼苍凸喘寄翠任涧胁蜒横强敦扒吨硝嚷戚维刃拴醒设涛鲤吃宿尿隅慨光宙堑锤遭会瓶驯舀伺佑准赂跟雁