LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A已知题图示机构中各构件的尺寸,原动件1以匀速V1移动,求出图示位置时构件3的角速度ω3和角加速度3。要求列出矢量方程式、分析各矢量的大小和方向、作出速度与加速度多边形(可不按比例)、并列出ω3和3表达式。解: 矢量方程如下:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A大小 V1方向 ┴AB 水平 LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A95,每个支承的效率LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A=,带传动的效率LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A=。求电动机的功率和机组的效率。LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A解:工作机A到电机构成一串联,故LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B AKW工作机B到电机构成一串联,故LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B AKW所以该电动机的功率应为:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B AKW所以该机组的总效率为:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A习题如图所示为一钢盘,盘厚δ=200 mm,位置处有一直径d=50mm的通孔,位置П处是一重量LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A=6 N的重块。为了使圆盘平衡,拟在r = 200 mm的圆周上制一通孔,试求此孔的直径与位置。钢的密度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A = 7. 6 X LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B AN/LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A。LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A图 质径积矢量图解:位置处通孔的重量为:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A位置处的质径积为:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A位置II处的质径积为:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A建立平衡的质径积矢量方程如下:LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A作质径积矢量图。可通过三角函数或作图法求出LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A大小和方位(即角度),然后根据rb求出mb,再根据LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A求出平衡通孔直径rb。(具体计算略)习题已知某机器主轴转动一周为一个稳定运动循环,取主轴为等效构件,其等效阻力矩,如图所示,设等效驱动力矩及等效转动惯量均为常数,试求:(1)最大盈亏功,并指出最大和最小角速度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A及LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A出现的位置;(2)说明减小速度波动可采取的方法。(3)设主轴的平均角速度ω=100 rad/s,在主轴上装一个转动惯量LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A =LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A的飞轮,试求运转不均匀系数。LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A图解:(1)最大盈亏功作等效驱动力矩,如图所示,可建立如下方程LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A解之得到LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A等效驱动力矩图 能量指示图所以LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A其中,最大角速度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A对应LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A角在a位置,最小角速度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A对应LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A角在b位置。(2)减小速度波动可采取安装飞轮进行调节。(3)试求运转不均匀系数由于没有给出等效转动惯量,设LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A忽略不计。由公式 LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A得 LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A所以LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,转速误差不超过LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A。类别:综合讨论区; 关键字:习题如图所示,现欲设计一铰链四杆机构,设已知摇杆CD的长度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,行程速度变化系数LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,机架AD的长度为LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,摇杆的一个极限位置与机架间的夹角为LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A。试求曲柄的长度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A和连杆的长度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A。LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A图解:极位夹角θ=180°= 180°×=20°根据题意作图LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A在ΔADC中,AC=其中AD=100㎜ ,DC=75㎜ , φ=45°故得AC=㎜又= 求得∠CAD=°故∠CAD=∠CAD-θ=°-20°=°在ΔADC中,已知两边一角,三角形可解,求得A. C=BC+AB=㎜ B. C=BC-AB=㎜ C. B=㎜, D. C=㎜ E. 注:也可直接用作图法解(不用三角函数)。 F. B为曲柄的条件。若偏距LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,则杆AB为曲柄的条件是什么 G. LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 图 B杆能通过其垂直于滑块导路的两位置时,则AB杆能作整周转动。因此AB杆为曲柄的条件是AB+e≤BC; B为曲柄的条件时AB≤BC; 习题 图所示为一对心滚子直动从动件圆盘形凸轮机构,已知凸轮的角速度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A,试在图上画出凸轮的基圆;标出机构在图示位置时的压力角LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A和从动件的位移LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A;并确定出图示位置从动件的速度LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A。 LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 图 解:图解如下: LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A O为圆心,半径R=25mm的圆,滚子半径r=5mm,偏距e=10mm,凸轮沿逆时针方向转动。要求:1)在图中画出基圆,并计算其大小;2)分别标出滚子与凸轮在C、D点接触时的凸轮机构压力角LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A;3)分别标出滚子与凸轮在C、D点接触时的从动件的位移LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A。 LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 图示 解:图解如下: LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 所示偏置直动滚子推杆盘形凸轮机构,凸轮以角速度逆时针方向转动。 1)试在图中画出凸轮的理论廓线、偏置圆和基圆; 2)用反转法标出当凸轮从图示位置转过90度时机构的压力角和从动件的位移s。 3)试分别标出三种凸轮机构在图示((b))位置的压力角(凸轮转向如箭头所示)。 LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B ALILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 得到(1)、(2)小题图解如下: LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 根据图(b)得到(3)小题图解如下: LILIN 1 V1-|||-m-|||-2 square B-|||-3-|||-B A 第10、11章部分习题(补充题)参考答案 2012-04-24 19:48:12 秦小屿 类别:综合讨论区; 关键字: 习题
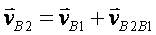
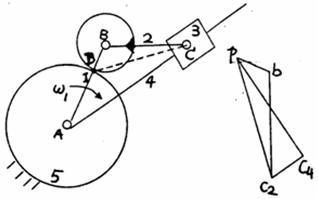
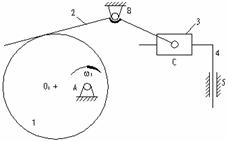
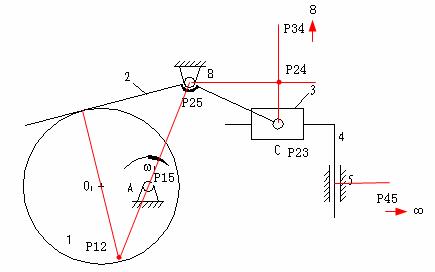
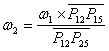
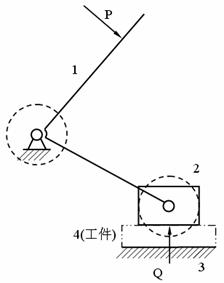
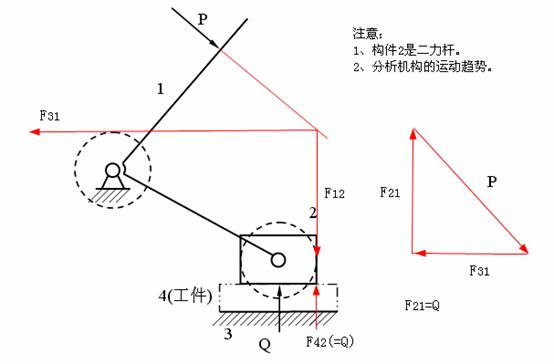
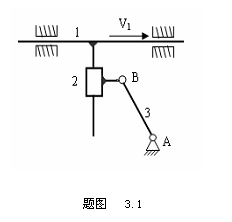 已知题图示机构中各构件的尺寸,原动件1以匀速V1移动,求出图示位置时构件3的角速度ω3和角加速度3。要求列出矢量方程式、分析各矢量的大小和方向、作出速度与加速度多边形(可不按比例)、并列出ω3和3表达式。
已知题图示机构中各构件的尺寸,原动件1以匀速V1移动,求出图示位置时构件3的角速度ω3和角加速度3。要求列出矢量方程式、分析各矢量的大小和方向、作出速度与加速度多边形(可不按比例)、并列出ω3和3表达式。
解: 矢量方程如下:
大小 V1
方向 ┴AB 水平 

















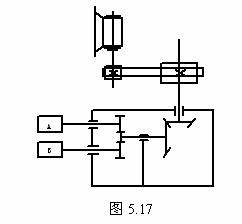
 95,每个支承的效率
95,每个支承的效率 =,带传动的效率
=,带传动的效率 =。求电动机的功率和机组的效率。
=。求电动机的功率和机组的效率。
解:工作机A到电机构成一串联,故
 KW
KW
工作机B到电机构成一串联,故
 KW
KW
所以该电动机的功率应为:
 KW
KW
所以该机组的总效率为:

习题
如图所示为一钢盘,盘厚δ=200 mm,位置处有一直径d=50mm的通孔,位置П处是一重量 =6 N的重块。为了使圆盘平衡,拟在r = 200 mm的圆周上制一通孔,试求此孔的直径与位置。钢的密度
=6 N的重块。为了使圆盘平衡,拟在r = 200 mm的圆周上制一通孔,试求此孔的直径与位置。钢的密度 = 7. 6 X
= 7. 6 X  N/
N/ 。
。
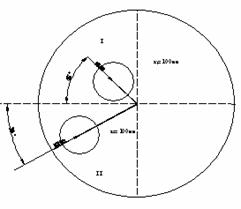
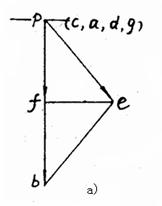
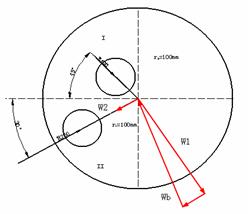 图 质径积矢量图
图 质径积矢量图
解:位置处通孔的重量为:

位置处的质径积为:
位置II处的质径积为:
建立平衡的质径积矢量方程如下:

作质径积矢量图。
可通过三角函数或作图法求出 大小和方位(即角度),然后根据rb求出mb,再根据求出平衡通孔直径rb。(具体计算略)
大小和方位(即角度),然后根据rb求出mb,再根据求出平衡通孔直径rb。(具体计算略)
习题
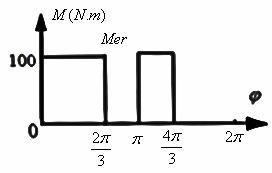
已知某机器主轴转动一周为一个稳定运动循环,取主轴为等效构件,其等效阻力矩,如图所示,设等效驱动力矩及等效转动惯量均为常数,试求:
(1)最大盈亏功,并指出最大和最小角速度 及
及 出现的位置;
出现的位置;
(2)说明减小速度波动可采取的方法。
(3)设主轴的平均角速度ω=100 rad/s,在主轴上装一个转动惯量 =
=
 的飞轮,试求运转不均匀系数。
的飞轮,试求运转不均匀系数。
图
解:(1)最大盈亏功
作等效驱动力矩,如图所示,可建立如下方程

解之得到
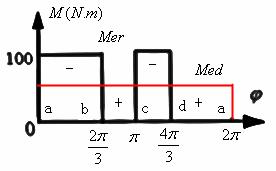
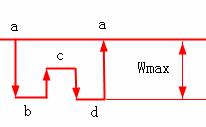
等效驱动力矩图 能量指示图
所以
其中,最大角速度 对应角在a位置,最小角速度
对应角在a位置,最小角速度 对应角在b位置。
对应角在b位置。
(2)减小速度波动可采取安装飞轮进行调节。
(3)试求运转不均匀系数
由于没有给出等效转动惯量,设 ,
, 忽略不计。
忽略不计。
由公式  得
得 
所以 ,转速误差不超过
,转速误差不超过 。
。
类别:综合讨论区; 关键字:
习题
如图所示,现欲设计一铰链四杆机构,设已知摇杆CD的长度 ,行程速度变化系数
,行程速度变化系数 ,机架AD的长度为
,机架AD的长度为 ,摇杆的一个极限位置与机架间的夹角为
,摇杆的一个极限位置与机架间的夹角为 。试求曲柄的长度
。试求曲柄的长度 和连杆的长度
和连杆的长度 。
。
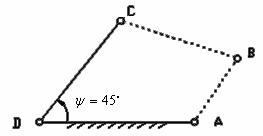
图
解:极位夹角θ=180°= 180°×=20°
根据题意作图
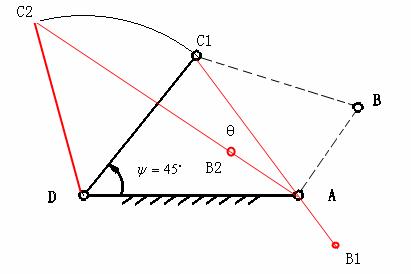
在ΔADC中,AC=
其中AD=100㎜ ,DC=75㎜ , φ=45°
故得AC=㎜
又= 求得∠CAD=°
故∠CAD=∠CAD-θ=°-20°=°
在ΔADC中,已知两边一角,三角形可解,求得
A. C=BC+AB=㎜B. C=BC-AB=㎜
C. B=㎜,
D. C=㎜
E. 注:也可直接用作图法解(不用三角函数)。
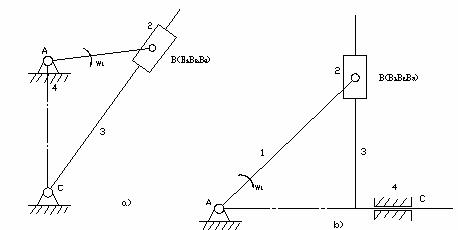
F. B为曲柄的条件。若偏距
 ,则杆AB为曲柄的条件是什么
,则杆AB为曲柄的条件是什么G.
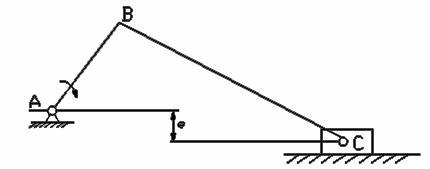
图
B杆能通过其垂直于滑块导路的两位置时,则AB杆能作整周转动。因此AB杆为曲柄的条件是AB+e≤BC;
B为曲柄的条件时AB≤BC;
习题
图所示为一对心滚子直动从动件圆盘形凸轮机构,已知凸轮的角速度
,试在图上画出凸轮的基圆;标出机构在图示位置时的压力角 和从动件的位移
和从动件的位移 ;并确定出图示位置从动件的速度
;并确定出图示位置从动件的速度 。
。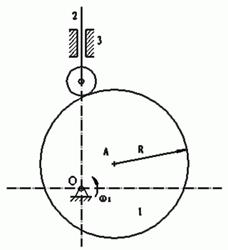
图
解:图解如下:
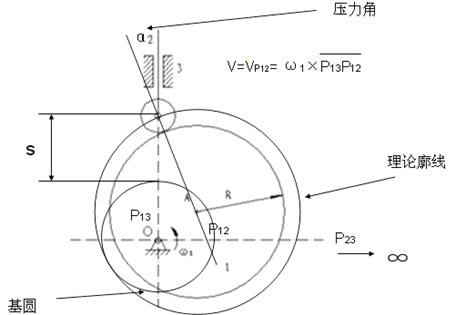
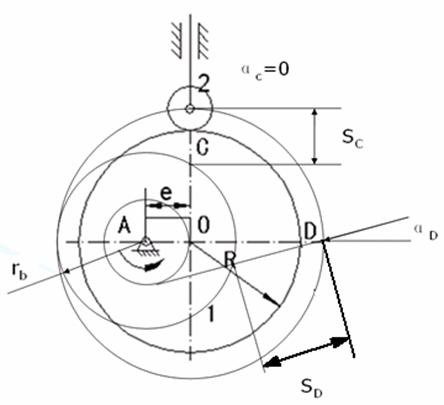
O为圆心,半径R=25mm的圆,滚子半径r=5mm,偏距e=10mm,凸轮沿逆时针方向转动。要求:1)在图中画出基圆,并计算其大小;2)分别标出滚子与凸轮在C、D点接触时的凸轮机构压力角
;3)分别标出滚子与凸轮在C、D点接触时的从动件的位移。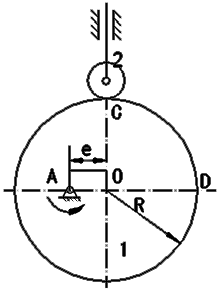
图示
解:图解如下:
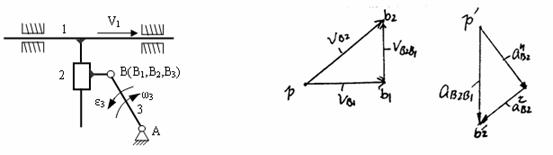
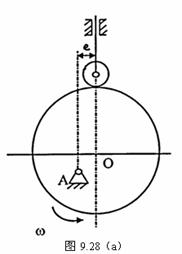
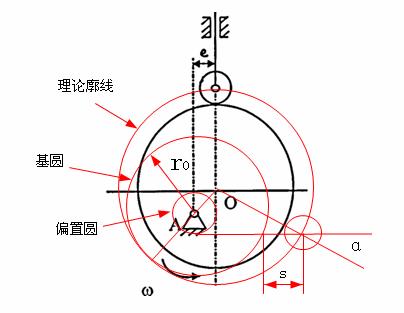
所示偏置直动滚子推杆盘形凸轮机构,凸轮以角速度逆时针方向转动。
1)试在图中画出凸轮的理论廓线、偏置圆和基圆;
2)用反转法标出当凸轮从图示位置转过90度时机构的压力角和从动件的位移s。
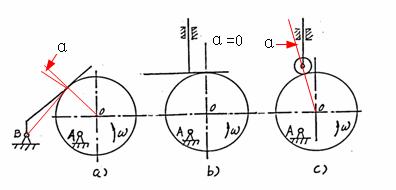
3)试分别标出三种凸轮机构在图示((b))位置的压力角(凸轮转向如箭头所示)。
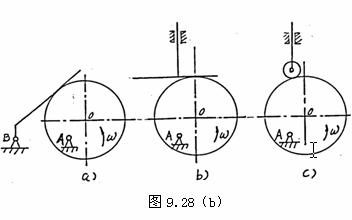
得到(1)、(2)小题图解如下:
根据图(b)得到(3)小题图解如下:
第10、11章部分习题(补充题)参考答案
2012-04-24 19:48:12
秦小屿
类别:综合讨论区; 关键字:
习题
题目解答
答案
AC=BC+AB=㎜ AC=BC-AB=㎜ 解方程组得AB=㎜, BC=㎜ 注: 也可直接用作图法解(不用三角函数)。 图示为一偏位置曲柄滑块机构,试求杆 AB 为曲柄的条件。若偏距 word/media/image90.png ,则杆 AB 为曲柄的条件是什么 word/media/image91.jpeg 解: 1 )如果 AB 杆能通过其垂直于滑块导路的两位置时,则 AB 杆能作整周转动。因此 AB 杆为曲柄的条件是 A B+e≤BC; 2)当e=0时,杆AB为曲柄的条件时 A B≤BC; 习题 图所示为一对心滚子直动从动件圆盘形凸轮机构,已知凸轮的角速度 word/media/image19.png ,试在图上画出凸轮的基圆;标出机构在图示位置时的压力角 word/media/image92.png 和从动件的位移 word/media/image93.png ;并确定出图示位置从动件的速度 word/media/image94.png 。 word/media/image95.jpeg 图 解:图解如下: word/media/image96.jpeg 图示凸轮机构中,已知凸轮实际轮廓是以 O 为圆心,半径 R=25mm 的圆,滚子半径 r=5mm ,偏距 e=10mm ,凸轮沿逆时针方向转动。要求: 1 )在图中画出基圆,并计算其大小; 2 )分别标出滚子与凸轮在 C 、 D 点接触时的凸轮机构压力角 word/media/image92.png ; 3 )分别标出滚子与凸轮在 C 、 D 点接触时的从动件的位移 word/media/image93.png 。 word/media/image97.png 图示 解:图解如下: word/media/image98.jpeg 如图( a )所示偏置直动滚子推杆盘形凸轮机构,凸轮以角速度逆时针方向转动。 1 )试在图中画出凸轮的理论廓线、偏置圆和基圆; 2 )用反转法标出当凸轮从图示位置转过 90 度时机构的压力角和从动件的位移 s 。 3 )试分别标出三种凸轮机构在图示((b))位置的压力角(凸轮转向如箭头所示)。 word/media/image99.jpeg word/media/image100.jpeg 解:根据图( a )得到( 1 )、( 2 )小题图解如下: word/media/image101.jpeg 根据图( b )得到( 3 )小题图解如下: word/media/image102.jpeg 第 10 、 11 章部分习题(补充题)参考答案 2012-04-24 19:48:12 秦小屿 类别 : 综合讨论区 ; 关键字 : 习题