题目
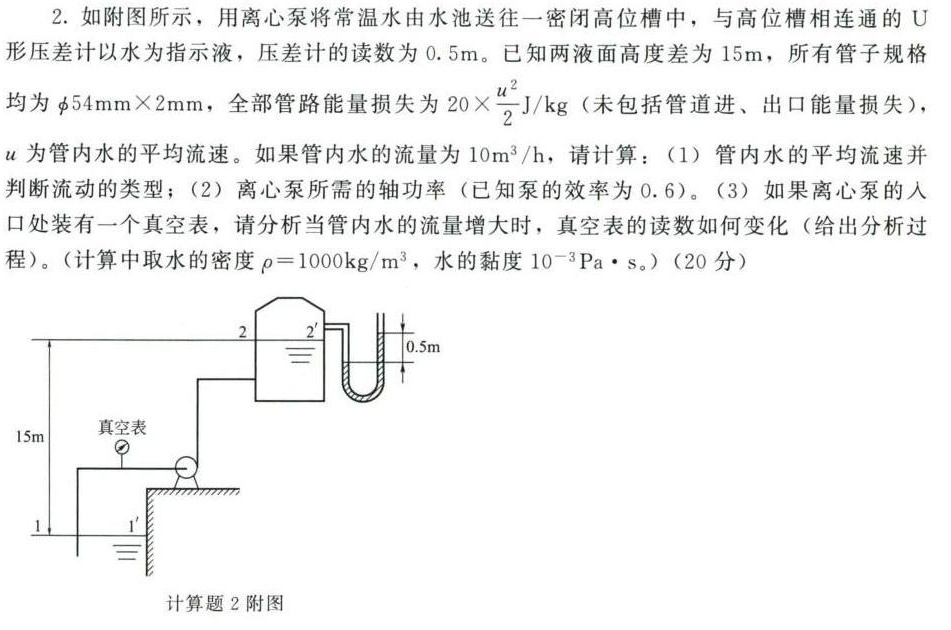
2.如附图所示,用离心泵将常温水由水池送往一密闭高位槽中,与高位槽相连通的U-|||-形压差计以水为指示液,压差计的读数为0.5m。已知两液面高度差为15m,所有管子规格-|||-均为 times 2mm, 全部管路能量损失为 times dfrac ({u)^2}(2)J/kg (未包括管道进、出口能量损失),-|||-u为管内水的平均流速。如果管内水的流量为 (m)^3/h, 请计算:(1)管内水的平均流速并-|||-判断流动的类型;(2)离心泵所需的轴功率(已知泵的效率为0.6)。(3)如果离心泵的入-|||-口处装有一个真空表,请分析当管内水的流量增大时,真空表的读数如何变化(给出分析过-|||-程)。(计算中取水的密度 rho =1000kg/(m)^3, 水的黏度 ^-3Pacdot (S)_(0) )(20分)-|||-2 2-|||-0.5m-|||-15m 真空表-|||-77-|||-1-|||-三-|||-计算题2附图
题目解答
答案

解析
步骤 1:计算管内水的平均流速
首先,根据流量 $Q = 10 m^3/h$,转换为 $m^3/s$,即 $Q = \frac{10}{3600} m^3/s = \frac{1}{360} m^3/s$。然后,根据管子的规格 $54mm \times 2mm$,计算管子的截面积 $A = \pi \times \left(\frac{54}{2} \times 10^{-3}\right)^2 m^2 = 2.29 \times 10^{-3} m^2$。最后,根据流量公式 $Q = A \times u$,计算管内水的平均流速 $u = \frac{Q}{A} = \frac{\frac{1}{360}}{2.29 \times 10^{-3}} m/s = 1.42 m/s$。
步骤 2:判断流动的类型
根据雷诺数 $Re = \frac{\rho u d}{\mu}$,其中 $\rho = 1000 kg/m^3$,$u = 1.42 m/s$,$d = 54 \times 10^{-3} m$,$\mu = 10^{-3} Pa \cdot s$,计算雷诺数 $Re = \frac{1000 \times 1.42 \times 54 \times 10^{-3}}{10^{-3}} = 76920$。由于 $Re > 4000$,流动类型为湍流。
步骤 3:计算离心泵所需的轴功率
根据伯努利方程,计算泵的扬程 $H = \frac{2gH_{\text{液面}} + 2gH_{\text{压差计}} + 20u^2}{2g}$,其中 $g = 9.81 m/s^2$,$H_{\text{液面}} = 15 m$,$H_{\text{压差计}} = 0.5 m$,$u = 1.42 m/s$。计算得到 $H = \frac{2 \times 9.81 \times 15 + 2 \times 9.81 \times 0.5 + 20 \times 1.42^2}{2 \times 9.81} m = 15.5 m$。然后,根据泵的效率 $\eta = 0.6$,计算泵的轴功率 $P = \frac{\rho g Q H}{\eta} = \frac{1000 \times 9.81 \times \frac{1}{360} \times 15.5}{0.6} W = 804.8 W$。
步骤 4:分析真空表的读数变化
当管内水的流量增大时,管内水的平均流速 $u$ 增大,根据伯努利方程,泵的扬程 $H$ 增大,泵的轴功率 $P$ 增大。由于泵的入口处装有一个真空表,真空表的读数与泵的入口处的压力有关。当泵的轴功率增大时,泵的入口处的压力减小,真空表的读数增大。
首先,根据流量 $Q = 10 m^3/h$,转换为 $m^3/s$,即 $Q = \frac{10}{3600} m^3/s = \frac{1}{360} m^3/s$。然后,根据管子的规格 $54mm \times 2mm$,计算管子的截面积 $A = \pi \times \left(\frac{54}{2} \times 10^{-3}\right)^2 m^2 = 2.29 \times 10^{-3} m^2$。最后,根据流量公式 $Q = A \times u$,计算管内水的平均流速 $u = \frac{Q}{A} = \frac{\frac{1}{360}}{2.29 \times 10^{-3}} m/s = 1.42 m/s$。
步骤 2:判断流动的类型
根据雷诺数 $Re = \frac{\rho u d}{\mu}$,其中 $\rho = 1000 kg/m^3$,$u = 1.42 m/s$,$d = 54 \times 10^{-3} m$,$\mu = 10^{-3} Pa \cdot s$,计算雷诺数 $Re = \frac{1000 \times 1.42 \times 54 \times 10^{-3}}{10^{-3}} = 76920$。由于 $Re > 4000$,流动类型为湍流。
步骤 3:计算离心泵所需的轴功率
根据伯努利方程,计算泵的扬程 $H = \frac{2gH_{\text{液面}} + 2gH_{\text{压差计}} + 20u^2}{2g}$,其中 $g = 9.81 m/s^2$,$H_{\text{液面}} = 15 m$,$H_{\text{压差计}} = 0.5 m$,$u = 1.42 m/s$。计算得到 $H = \frac{2 \times 9.81 \times 15 + 2 \times 9.81 \times 0.5 + 20 \times 1.42^2}{2 \times 9.81} m = 15.5 m$。然后,根据泵的效率 $\eta = 0.6$,计算泵的轴功率 $P = \frac{\rho g Q H}{\eta} = \frac{1000 \times 9.81 \times \frac{1}{360} \times 15.5}{0.6} W = 804.8 W$。
步骤 4:分析真空表的读数变化
当管内水的流量增大时,管内水的平均流速 $u$ 增大,根据伯努利方程,泵的扬程 $H$ 增大,泵的轴功率 $P$ 增大。由于泵的入口处装有一个真空表,真空表的读数与泵的入口处的压力有关。当泵的轴功率增大时,泵的入口处的压力减小,真空表的读数增大。