简述LED数码管的两种显示方式答:LED数码管的显示方式:静态与动态静态显示:各数码管在显示过程中持续得到送显信号,与各数码管接口持续得到送显信号I/O 口线专用的。特点:无闪烁,用元器件[1]多,占I/O线多,无须扫描,节省CPU时间, 编程简单。动态显示[2]:各数码管在显示过程中轮流得到送显信号,与各数码管接口 轮流得到送显信号 I/O 口线共用的。特点:有闪烁,用元器件少,占I/O线少,必须扫描,花费CPU时间, 编程复杂。7. 总结使用硬件构件化思想设计嵌入式硬件系统的过程与步骤。(1)根据系统的功能划分出若干个硬件构件;(2)将所有硬件构件原理图[3]‘组装’在一起;(3)为中间构件和终端构件添加接口网标8. 实现计数与定时的基本方法有哪些?比较它们的优缺点实现计数与定时的基本方法:1.完全硬件方式优点:比较方便缺点:需要进行延时、定时或计数,若要改变计数或定时的要求,必须改变电路参数,通用性和灵活性差。2.完全软件方式优点:节省硬件缺点:在执行延时期间,CPU^直被占用,不仅降低了 CPU勺使用效率,也不容易提供多作业环境3.可编程计数器/定时器 优点:计数时不占用CPU勺时间,还可以进行多作业的环境缺点:费用比较大9.简述串行通信的传输方式及其基本含义单工:数据传送是单向的,一端为发射端,一端为接收端全双工:数据传送是双向的,且可以同时接收和发送数据半双工:数据传送是双向的,只有一根数据线,在任何时刻,只能有一方发送数据,另一 方接收数据。10.8. 实现计数与定时的基本方法有哪些?比较它们的优缺点什么叫下拉电阻?它的作用是什么?下拉电阻一般是指一端接芯片管脚一端接地(GND的电阻。下拉电阻的主要 作用是使得悬空的芯片引脚被上拉电阻或下拉电阻初 始化为高电平或低电平。11.给出串行通信接口 TTL电平到RS-232电平转换电路的转换原理发送过程:MCU的TXD (TTL电平)经过 MAX232的11脚(T1IN)送到MAX232内部,在内部TTL电平被“提升”为32电平,通过14脚(T1OUT)发送出去。接收过程:外部232电平经过MAX232的13脚(R1IN)进入到MAX232的内部,在内部232电平被“降低”为TL电平,经过12脚(R1OUT)送到MCU的RxD,进入MCU 内部。12.PWM的功能答:①控制输入到某个设备的平均电流或电压。 ②控制命令字编码13•实际应用系统中电源引脚为什么要接两个电容?答:选用一个大容量电解电容器来为全体系统提供大电量存储,如 10pF的钽电容;另外选用一个0.1折的陶瓷旁路电容,尽可能靠近模拟电源引脚。用于抑制高频噪声。15.实现计数与定时的基本方法有哪些?试比较它们的优缺点。答:实现计数与定时的基本方法有三种:完全硬件方式、完全软件方式和可编程计数器定 时器方法。其中完全硬件方式速度快,但通用性和灵活性差;完全软件方式的优点是节省 硬件。主要缺点是执行延时程序期间, CPU-直被占用,所以降低了 CPU的使用效率,也不容易提供多作业环境;可编程计数器/定时器方法的最突出的优点是计数时不占用 CPU勺时 间。16.下表为字符型LCD的工作方式设置命令格式(7分)1DLNF给出DL、N、F的含义答:DL设置数据接口位数,DL=1,8位数据总线DB7~DB0;DL=0 4位数据总线DB7~DB, 而DB3~DB不用,在此方式下数据操作需两次完成。N:设置显示行数,N=1, 2行显示;N=0, 1行显示。F:设置点阵模式,F=0, 5X 7点阵;F=1, 5X 10点阵17.设计以mcu为核心的嵌入式系统硬件电路需要注意哪些方面的基本问题?答:1.MCU的选择2.电源3.普通I/O接口 4.A/D电路与D/A电路5.控制电路 18.S08CPU中共有哪些寄存器答:1.累加器A 2.变址寄存器HX 3.堆栈指针AP 4.程序计数器PC 5.条件码寄存器CCR20、 简述输入捕捉的功能答:输入捕捉功能是用来监测外部的事件和输入信号.当外部事件发生或信号发生变化时, 在指定的输入捕捉引脚上发生一个指定的沿跳变(可以指定该跳变是上升沿还是下降沿).定 时器捕捉到特定的沿跳变后,把计数寄存器当前的值锁存到通道寄存器。21、 什么是OC输出?为什么OC输出的I/O接口一定要上拉?上拉电阻阻值如何选择? 答:OC输出,即开漏输出,即集电极开路。只有接了上拉电阻,才能输出高低电平,否则 只能输出低电平了。 根据实际情况,上拉电阻可以取值在 1K Q〜10K Q之间,其阻值大小 与静态电流及系统功耗相关。22、 简述中断的作用与处理过程。答:中断的作用:把来自CPU外围设备的强行任务切换请求;中断的处理过程一般为:关中断(在此中断处理完成前,不处理其它中断)、保护现 场、执行中断服务程序、恢复现场、开中断等。23、 简述中断处理的一般过程答:关中断(这样,在此中断处理完成前,不处理其他中断)、保护现场、执行中断服务 程序、恢复现场、开中断等。24、 电源滤波电路的作用是什么答:用于改善系统的电磁兼容性,降低电源波动对系统的影响,增强电路工作稳定性。25、 什么叫半双工?半双工:允许设备之间的数据双向传输,但不能同时进行。好比作单轨的铁路或者对讲26.LED的译码方式有哪两种?分别写出它们的工作原理答:有硬件译码与软件译码两种方式。硬件译码方式:利用专门的硬件电路来实现显示字符到字段码的转换。软件译码方式:通过编写软件译码程序来得到要显示的字符的字段码 。27.键盘中断初始化顺序?答:1、KBIE=O (屏蔽中断)2、 KBIPEX=1(定义中断引脚)3、 写KBACK=1(清除KBI中断标志)4、 令KBIE=1 (开中断)28.简述什么是输出比较。答:输出比较的功能是用程序的方法在规定的时刻输出需要的电平,实现对外部电路的控制。29.比较AW6C定时器模块实现输出比较功能与 PWM功能的异同点。答:PWM产生一个在高电平和低电平之间重复交替的输出信号,这个信号被称为 PWMH号,也叫脉宽调制波。通过指定所需的时钟周期和占空比来控制高电平和低电平的持续时 间。通常定义占空比为信号处于高电平的时间(或时钟周期数)占整个信号周期的百分比, 方波的占空比是50%脉冲宽度是指脉冲处于高电平的时间。PW啲另一个常见用途是控制 输入到某个设备的平均电流或电压。PWM勺常见应用是为其他设备产生类似于时钟的信号。 因为S08是8位MCU系列,定时器通道寄存器的设置被缓存起来,以确保连续 16位数据更新,并避免出现意外的 PW脉冲宽度。写TPMxCnV或TPMxCnV中的任意一个寄存器, 也就是写缓冲寄存器。在边沿对齐模式下,只有在一个 16位寄存器的两个8位字节都被写入后,且TPMxCNTH:TPMxCN计数器中的值为0x0000,计数值被转移至相应的定时器通道 寄存器(直到下一个整周期新的占空比才有效)设置预置寄存器的值;设置通道数值寄存器的值;设置通道状态和控制寄存器中 值。ELSnA=O,计数器溢出强制输出为高电平,输出比较强制输出为低电平;ELS nA=1,计数器溢出强制输出为低电平,输出比较强制输出为高电平。30.AW6O 的硬件最小系统电源及其滤波电路;复位电路;晶振电路及 PLL 滤波电路;写入器接口电路31.写出条件码寄存器 CCR 中每一位的含义。溢出标志 V 半进位标志 H 中断屏蔽位 I 负标志 N 零标志 Z 进位 /借位标志 C32.什么是奇校验和偶校验?奇校验:如果字符数据位中“1”的数目是偶数,校验位应为“1”,如果1“”的数目是奇数, 校验位应为’0”。偶校验:如果字符数据位中“1”的数目是偶数,则校验位应为’0”,如果是奇数则为“”33.AW6O 内部机构有哪些部分组成?S08CPU、存储器、定时器接口模块、定时器模块、看门狗模块、通用 10模块、串口通信 模块(SCI)、串行外设接口( SPI)、I2C模块、A/D转换模块、键盘中断模块、时钟发生 模块、复位与中断模块等34.什么是行扫描法和行反转法?行扫描法 :逐行置低电平,其余各行为高电平,检查各列电平的变化,如果某列线电平 为低电平,即可确定此行列线交叉点处的按键被按下。行反转法 :首先,将行线编程为输入线,列线编程为输出线,然后使列线全输出低电平,读取行线电平,行线从高电平转为低电平的行线为按下按键所在行;然后,将列线 编程为输入线,行线编程为输出线,然后使行线全输出低电平,读取列线电平,列线从高电平转为低电平的列线为按下按键所在列S08 CPU的寻址方式:INCA STOP RTI SEC内在寻址方式STA #23 LDA #FC 立即寻址方式LDA 23 LDA DE23 直接寻址方式LDA 023D 扩展寻址方式COM ,X无偏移量寻址方式LDA 80,X8 位偏移量变址方式STA 280,X 16 位偏移量变址方式BSR L1相对变址寻址MOV 23, 34 直接地址—直接地址寻址方式MOV 6A, X+直接地址—变址、变址加 1 的寻址方式MOV #80,80 立即数—直接地址寻址方式MOV X+,80 变址-直接地址、变址加 1的寻址方式CBEQ X+, rel 无偏移量变址,变址加 1寻址方式LDA 34,SP LDA 2,SP 8 位偏移量堆栈寻址方式LDA 130,SP 16 位偏移量堆栈寻址方式1•写出SCI初始化程序,波特率为9600,总线时钟频率为20Mhz,计算出波特率寄存器的值。
简述LED数码管的两种显示方式
答:LED数码管的显示方式:静态与动态
静态显示:各数码管在显示过程中持续得到送显信号,与各数码管接口持续得到送显信号
I/O 口线专用的。特点:无闪烁,用元器件[1]多,占I/O线多,无须扫描,节省CPU时间, 编程简单。
动态显示[2]:各数码管在显示过程中轮流得到送显信号,与各数码管接口 轮流得到送显信号 I/O 口线共用的。特点:有闪烁,用元器件少,占I/O线少,必须扫描,花费CPU时间, 编程复杂。
7. 总结使用硬件构件化思想设计嵌入式硬件系统的过程与步骤。
(1)根据系统的功能划分出若干个硬件构件;(2)将所有硬件构件原理图[3]‘组装’在一起;
(3)为中间构件和终端构件添加接口网标

实现计数与定时的基本方法:
1.完全硬件方式
优点:比较方便
缺点:需要进行延时、定时或计数,若要改变计数或定时的要求,必须改变电路参数,通
用性和灵活性差。
2.完全软件方式
优点:节省硬件
缺点:在执行延时期间,CPU^直被占用,不仅降低了 CPU勺使用效率,也不容易提供多作
业环境
3.可编程计数器/定时器 优点:计数时不占用CPU勺时间,还可以进行多作业的环境
缺点:费用比较大
9.简述串行通信的传输方式及其基本含义
单工:数据传送是单向的,一端为发射端,一端为接收端
全双工:数据传送是双向的,且可以同时接收和发送数据
半双工:数据传送是双向的,只有一根数据线,在任何时刻,只能有一方发送数据,另一 方接收数据。
10. 什么叫下拉电阻?它的作用是什么?
什么叫下拉电阻?它的作用是什么?
下拉电阻一般是指一端接芯片管脚一端接地(GND的电阻。
下拉电阻的主要 作用是使得悬空的芯片引脚被上拉电阻或下拉电阻初 始化为高电平或低电平。
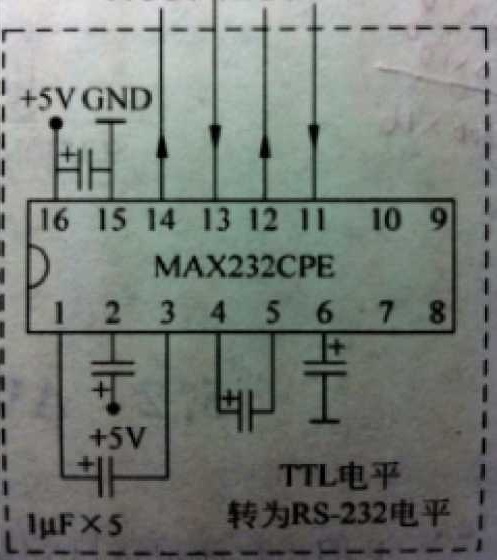
11.给出串行通信接口 TTL电平到RS-232电平转换电路的转换原理
发送过程:MCU的TXD (TTL电平)经过 MAX232的11脚(T1IN)送到MAX232内
部,在内部TTL电平被“提升”为32电平,通过14脚(T1OUT)发送出去。
接收过程:外部232电平经过MAX232的13脚(R1IN)进入到MAX232的内部,在
内部232电平被“降低”为TL电平,经过12脚(R1OUT)送到MCU的RxD,进入MCU 内部。
12.PWM的功能
答:①控制输入到某个设备的平均电流或电压。 ②控制命令字编码
13•实际应用系统中电源引脚为什么要接两个电容?
答:选用一个大容量电解电容器来为全体系统提供大电量存储,如 10pF的钽电容;另外选
用一个0.1折的陶瓷旁路电容,尽可能靠近模拟电源引脚。用于抑制高频噪声。
15.实现计数与定时的基本方法有哪些?试比较它们的优缺点。
答:实现计数与定时的基本方法有三种:完全硬件方式、完全软件方式和可编程计数器定 时器方法。其中完全硬件方式速度快,但通用性和灵活性差;完全软件方式的优点是节省 硬件。主要缺点是执行延时程序期间, CPU-直被占用,所以降低了 CPU的使用效率,也不
容易提供多作业环境;可编程计数器/定时器方法的最突出的优点是计数时不占用 CPU勺时 间。
16.下表为字符型LCD的工作方式设置命令格式(7分)
1
DL
N
F
给出DL、N、F的含义
答:DL设置数据接口位数,DL=1,8位数据总线DB7~DB0;DL=0 4位数据总线DB7~DB, 而DB3~DB不用,在此方式下数据操作需两次完成。
N:设置显示行数,N=1, 2行显示;N=0, 1行显示。
F:设置点阵模式,F=0, 5X 7点阵;F=1, 5X 10点阵
17.设计以mcu为核心的嵌入式系统硬件电路需要注意哪些方面的基本问题?
答:1.MCU的选择2.电源3.普通I/O接口 4.A/D电路与D/A电路5.控制电路 18.S08CPU中共有哪些寄存器
答:1.累加器A 2.变址寄存器HX 3.堆栈指针AP 4.程序计数器PC 5.条件码寄存器CCR
20、 简述输入捕捉的功能
答:输入捕捉功能是用来监测外部的事件和输入信号.当外部事件发生或信号发生变化时, 在指定的输入捕捉引脚上发生一个指定的沿跳变(可以指定该跳变是上升沿还是下降沿).定 时器捕捉到特定的沿跳变后,把计数寄存器当前的值锁存到通道寄存器。
21、 什么是OC输出?为什么OC输出的I/O接口一定要上拉?上拉电阻阻值如何选择? 答:OC输出,即开漏输出,即集电极开路。只有接了上拉电阻,才能输出高低电平,否则 只能输出低电平了。 根据实际情况,上拉电阻可以取值在 1K Q〜10K Q之间,其阻值大小 与静态电流及系统功耗相关。
22、 简述中断的作用与处理过程。
答:中断的作用:把来自CPU外围设备的强行任务切换请求;
中断的处理过程一般为:关中断(在此中断处理完成前,不处理其它中断)、保护现 场、执行中断服务程序、恢复现场、开中断等。
23、 简述中断处理的一般过程
答:关中断(这样,在此中断处理完成前,不处理其他中断)、保护现场、执行中断服务 程序、恢复现场、开中断等。
24、 电源滤波电路的作用是什么
答:用于改善系统的电磁兼容性,降低电源波动对系统的影响,增强电路工作稳定性。
25、 什么叫半双工?
半双工:允许设备之间的数据双向传输,但不能同时进行。好比作单轨的铁路或者对讲
26.LED的译码方式有哪两种?分别写出它们的工作原理
答:有硬件译码与软件译码两种方式。
硬件译码方式:利用专门的硬件电路来实现显示字符到字段码的转换。
软件译码方式:通过编写软件译码程序来得到要显示的字符的字段码 。
27.键盘中断初始化顺序?
答:1、KBIE=O (屏蔽中断)
2、 KBIPEX=1(定义中断引脚)
3、 写KBACK=1(清除KBI中断标志)
4、 令KBIE=1 (开中断)
28.简述什么是输出比较。
答:输出比较的功能是用程序的方法在规定的时刻输出需要的电平,实现对外部电路的控
制。
29.比较AW6C定时器模块实现输出比较功能与 PWM功能的异同点。
答:PWM产生一个在高电平和低电平之间重复交替的输出信号,这个信号被称为 PWMH
号,也叫脉宽调制波。通过指定所需的时钟周期和占空比来控制高电平和低电平的持续时 间。通常定义占空比为信号处于高电平的时间(或时钟周期数)占整个信号周期的百分比, 方波的占空比是50%脉冲宽度是指脉冲处于高电平的时间。PW啲另一个常见用途是控制 输入到某个设备的平均电流或电压。PWM勺常见应用是为其他设备产生类似于时钟的信号。 因为S08是8位MCU系列,定时器通道寄存器的设置被缓存起来,以确保连续 16位数据
更新,并避免出现意外的 PW脉冲宽度。写TPMxCnV或TPMxCnV中的任意一个寄存器, 也就是写缓冲寄存器。在边沿对齐模式下,只有在一个 16位寄存器的两个8位字节都被写
入后,且TPMxCNTH:TPMxCN计数器中的值为0x0000,计数值被转移至相应的定时器通道 寄存器(直到下一个整周期新的占空比才有效)
设置预置寄存器的值;设置通道数值寄存器的值;设置通道状态和控制寄存器中 值。
ELSnA=O,计数器溢出强制输出为高电平,输出比较强制输出为低电平;
ELS nA=1,计数器溢出强制输出为低电平,输出比较强制输出为高电平。
30.AW6O 的硬件最小系统
电源及其滤波电路;复位电路;晶振电路及 PLL 滤波电路;写入器接口电路
31.写出条件码寄存器 CCR 中每一位的含义。
溢出标志 V 半进位标志 H 中断屏蔽位 I 负标志 N 零标志 Z 进位 /借位标志 C
32.什么是奇校验和偶校验?
奇校验:如果字符数据位中“1”的数目是偶数,校验位应为“1”,如果1“”的数目是奇数, 校验位应为’0”。
偶校验:如果字符数据位中“1”的数目是偶数,则校验位应为’0”,如果是奇数则为“”
33.AW6O 内部机构有哪些部分组成?
S08CPU、存储器、定时器接口模块、定时器模块、看门狗模块、通用 10模块、串口通信 模块(SCI)、串行外设接口( SPI)、I2C模块、A/D转换模块、键盘中断模块、时钟发生 模块、复位与中断模块等
34.什么是行扫描法和行反转法?
行扫描法 :逐行置低电平,其余各行为高电平,检查各列电平的变化,如果某列线电平 为低电平,即可确定此行列线交叉点处的按键被按下。
行反转法 :首先,将行线编程为输入线,列线编程为输出线,然后使列线全输出低电
平,读取行线电平,行线从高电平转为低电平的行线为按下按键所在行;然后,将列线 编程为输入线,行线编程为输出线,然后使行线全输出低电平,读取列线电平,列线从
高电平转为低电平的列线为按下按键所在列
S08 CPU的寻址方式:
INCA STOP RTI SEC内在寻址方式
STA #$23 LDA #$FC 立即寻址方式
LDA $23 LDA $DE23 直接寻址方式
LDA $023D 扩展寻址方式
COM ,X
无偏移量寻址方式
LDA $80,X
8 位偏移量变址方式
STA $280,X 16 位偏移量变址方式
BSR L1
相对变址寻址
MOV $23, $34 直接地址—直接地址寻址方式
MOV $6A, X+
直接地址—变址、变址加 1 的寻址方式
MOV #$80,$80 立即数—直接地址寻址方式
MOV X+,$80 变址-直接地址、变址加 1的寻址方式
CBEQ X+, rel 无偏移量变址,变址加 1寻址方式
LDA $34,SP LDA 2,SP 8 位偏移量堆栈寻址方式
LDA $130,SP 16 位偏移量堆栈寻址方式
1•写出SCI初始化程序,波特率为9600,总线时钟频率为20Mhz,计算出波特率寄存器的
值。
题目解答
答案
解: void SCIInit(uint8 SCINo,uint8 sysclk,uint16 baud) {uint16 ubgs;
ubgs=0;
If(SCINo>2)
{SCINo=2;
}
ubgs=sysclk*(10000/(baud/100))/16; SCI_BDH(SCINo)=(uint8)((ubgs&0xFF00)>>8);
SCI_BDL(ACINo)=(uint8)(ubgs&0x00FF); SCI_C1(SCINo)=0b00000000;
SCI_C2(SCINo)=0b00001100;
}
波特率[4]=fBuscLK心6*BR) 即 9600= (20*106)Hz/(16*BR), 所以 BR=130
2.写出 AW60 的键盘中断处理[5]函数。
解: #include "isr.h"
interrupt void isrKeyBoard(void)
{uint8 value;
uint16 i; for(i=0;i<1000;i++); DisableInterrupt(); DisableKBint90; value=KBscanN(10); if(value!=0xFF) {scIsend1(1,value); scIsend1(1,KBDef(value));
} KBInit(); EnableKBint(); EnableInterrupt();
}
Interrupt void isrDummy ( void)
{
}
typedef void(*IsR_func_t)(void)
const IsR_func_t IsR_vectors[]@0xFFcc=
{isrDummy,
isrKeyBoard,
isrDummy,
};
3•设总线时钟频率为20MHz,定时0.01s,试写出定时器初始化程序。
解: #include "timer.c"
void TPMinit(uint8 TPMNo)
{if(TPMNo>2)
TPMNo=2;
else if(TPMNo<1)
TPMNo=1;
TPM_CSTR(TPMNo ) =0b00010110;
TPM_CNTH(TPMNo)=0x00;
TPM_CNTL(TPMNo)=0x00;
TPM_MODH(TPMNo)=0x08;
TPM_MODL(TPMNo ) =0x6A;
}
void SecAddl(uint8 *p)
{* (p+2)+=1;
if(* (p+2)>=60);
{* (p+2)=0;
* (p+1)+=1;
if(* (p+1)>=60);
{* (p+1)=0;
* p + =1;
if(* p > =24);
* p =0;
}
}
}