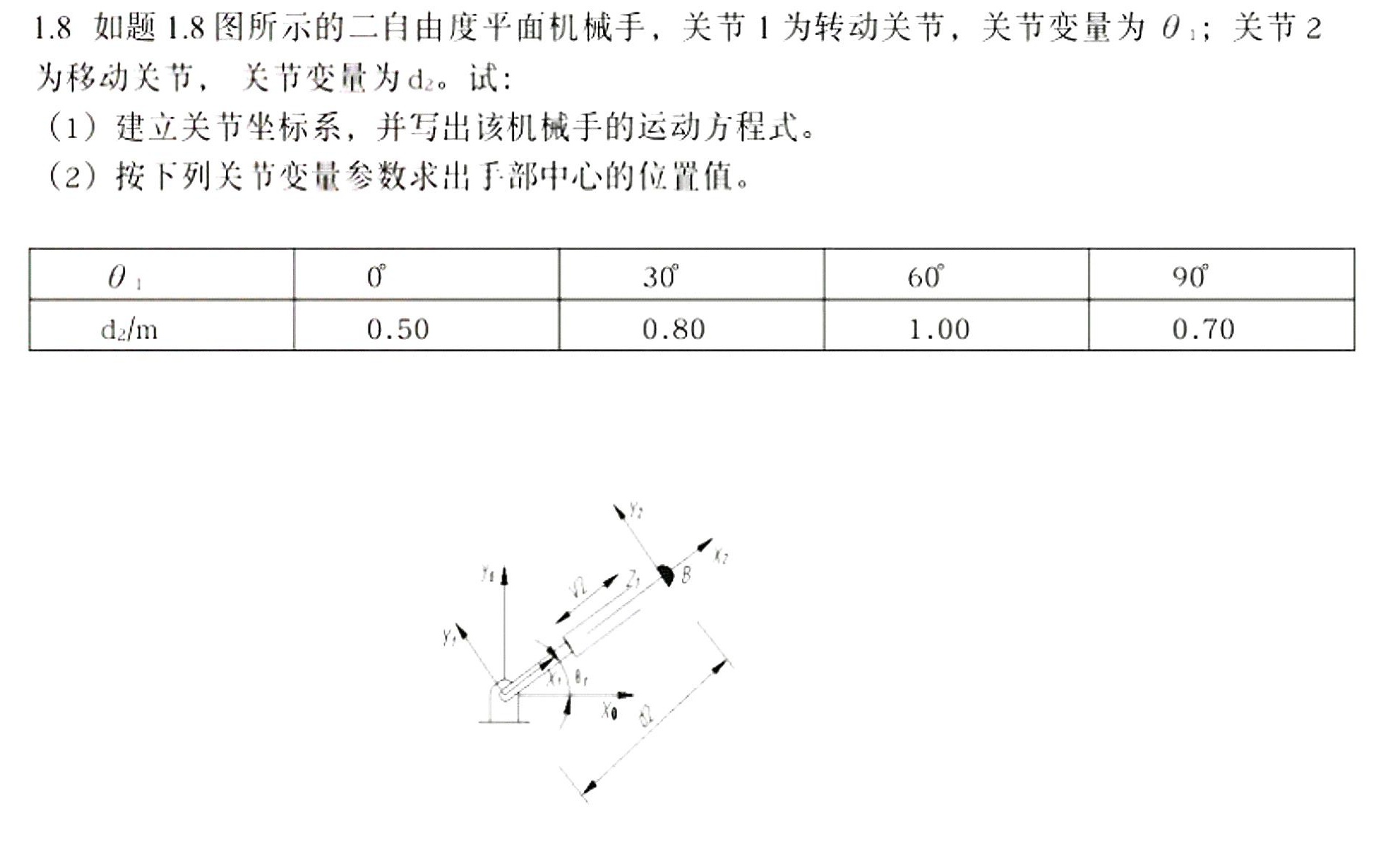
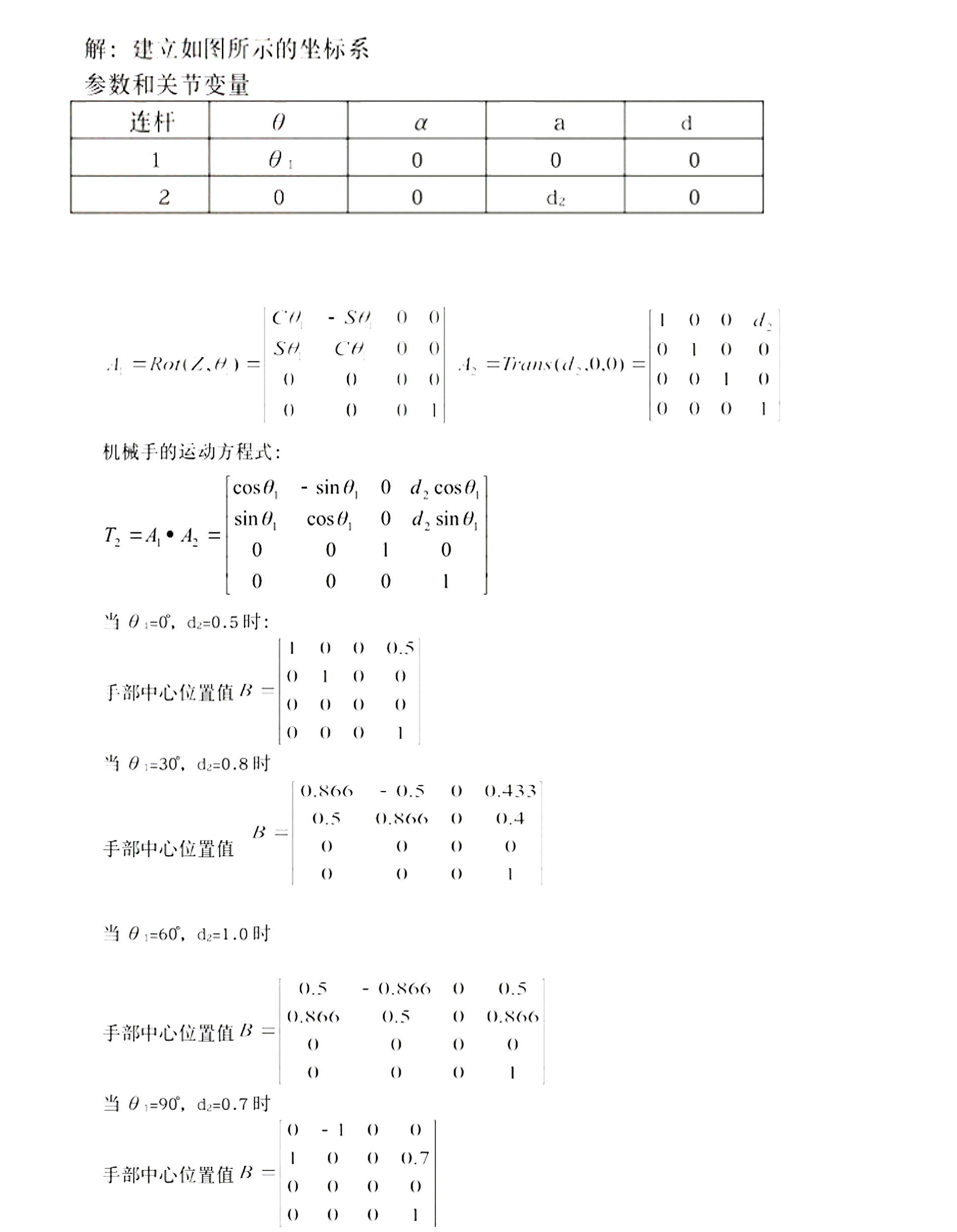
题目1.8 如题1.8图所示的二自由度平面机械手,关节1为转动关节,关节变量为θ1;关节2-|||-为移动关节,关节变量为d2。试:-|||-(1)建立关节坐标系,并写出该机械手的运动方程式。-|||-(2)按下列关节变量参数求出手部中心的位置值。-|||-0 0° 30° 60° 90°-|||-/m 0.50 0.80 1.00 0.70-|||-y, ,题目解答答案