题目
二、选择题[1]曲柄[1]摇杆机构中“死点[2]”产生的根本原因是( )。A. 没有在曲柄上装一飞轮 B. 摇杆为主动件 C. 施与从动件的力其作用线通过从动件的旋转中心 D. [2]在下列平面四杆机构中,无论以哪一构件为主动件,都不存在死点位置( )。 E. 曲柄摇杆机构 F. 双摇杆机构 G. 双曲柄机构[3]曲柄摇杆机构中,摇杆为主动件时,( )死点位置。不存在曲柄与连杆[3]共线时为摇杆与连杆共线时为[4]下列铰链四杆机构中,能实现急回运动的是( )。双摇杆机构曲柄摇杆机构双曲柄机构对心曲柄滑块机构[5]在曲柄摇杆机构中,为提高机构的传力性能,应该( )。增大传动角γ减小传动角γ增大压力角α减小极位夹角θ[6]在双曲柄机构中,已知三杆长度为a=80mm,b=150mm,c=120mm,则d 杆长度为( )。<110mm110mm≤d≤190mm≥190mm[7]一曲柄摇杆机构,若改为以曲柄为机架,则将演化为( )。曲柄摇杆机构双曲柄机构双摇杆机构导杆机构[8]铰链四杆机构ABCD中,AB为曲柄,CD为摇杆,BC为连杆。若杆长lAB=30mm,lBC=70mm,lCD=80mm,则机架最大杆长为( )。80mm100mm120mm150mm[9]在下列平面四杆机构中,一定无急回特性的机构是( )曲柄摇杆机构摆动导杆机构对心曲柄滑块机构偏置曲柄滑块机构[10]工程中常借用( )使机构渡过死点。飞轮某机构皮带轮机轮[11]曲柄摇杆机构中,若曲柄为主动件时,其最小传动角的位置在( )位置之一。曲柄与机架的两个共线摇杆的两个极限曲柄与连杆的两个共线[12]平面四杆机构中,最长杆与最短杆长度之和大于其余两杆长度之和,只能得到( )机构。双摇杆双曲柄曲柄摇杆[13]平面连杆机构的急回特性可以缩短( ),提高生产效率。非生产时间生产时间[14]曲柄摇杆机构中,曲柄的长度为( )。最长最短大于连杆长度[4]大于摇杆长度[15]各构件尺寸如图所示,则此机构为( )。曲柄摇杆机构双摇杆机构条件不足不能确定1200-|||-100[16]在平面四杆机构中,压力角与传动角的关系为( )。压力角增大则传动角减小压力角增大则传动角也增大压力角始终与传动角相等[17]一铰链四杆机构四杆的长度分别为60、80、30、100mm,当以60 mm的杆(最短杆的邻边)为机架时,则该机构为( )机构。曲柄摇杆双曲柄双摇杆[18]铰链四杆机构中,能实现急回运动的是( )。双曲柄机构双摇杆机构对心曲柄滑块机构曲柄摇杆机构[19]以下关于机构急回运动特性的论述正确的是( )急回运动特性只有曲柄摇杆机构具有。急回运动特性可用来缩短空回行程时间,提高生产率。极位夹角等于零时,机构具有急回特性。行程速比系数越小,急回特性越显著。[20]曲柄摇杆机构中,曲柄为主动件时,( )死点位置。曲柄与连杆共线时为摇杆与连杆共线时不存在[21]铰链四杆机构ABCD中,AB为曲柄,CD为摇杆,BC为连杆。若杆长lAB=30mm,lBC=70mm,lCD=80mm,则机架最大杆长为( )。80mm100mm120mm150mm[22]四杆机构处于死点时,其传动角为( )。介于0°~90°之间0°90°45°[23]下列机构中,传力性能最好的是( )。曲柄摇杆机构曲柄滑块机构导杆机构偏心轮机构[24]在图示铰链四杆机构中,若以 a 杆为机架,则机构为( )。曲柄摇杆机构双摇杆机构双曲柄机构1200-|||-100[25]在图示铰链四杆机构中,若b杆为机架,则机构为( )。曲柄摇杆机构双曲柄机构双摇杆机构1200-|||-100[26]( )能把转动运动转变成往复摆动运动。曲柄摇杆机构双曲柄机构双摇杆机构曲柄滑块机构[27]铰链四杆机构中存在曲柄时,曲柄( )是最短构件。一定不一定一定不[28]铰链四杆机构的压力角越大,对机构传力越( )。有利不利无影响[29]铰链四杆机构的压力角是指在不计摩擦和外力的条件下连杆作用于( )上的力与该力作用点的速度间所夹的锐角。主动连架杆从动连架杆机架[30]下面四个机构运动简图所示的四个铰链四杆机构,图( )是双曲柄机构。1200-|||-100[31]已知一铰链四杆机构ABCD,lAB=25mm,lBC=50mm,lCD=40mm,lAD=30mm,且AD为机架那么,此机构为( )。双曲柄机构曲柄摇杆机构双摇杆机构[32]要将一个曲柄摇杆机构转化成双摇杆机构,可以用机架转换法将( )。原机构的曲柄作为机架原机构的连杆作为机架原机构的摇杆作为机架[33]连杆机构行程速比系数是指从动杆反、正行程( )。瞬时速度的比值最大速度的比值平均速度的比值[34]对心曲柄滑块机构以曲柄为原动件时,其最大传动角γmax为( )。30°45°90°[35]设计连杆机构时,为了具有良好的传动条件,应使( )。传动角大一些,压力角小一些传动角和压力角都小一些传动角和压力角都大一些[36]平行四杆机构工作时,其传动角( )。始终保持为90°始终是0°是变化值[37]下图所示的摆动导杆机构中,机构的传动角是( )。角B角C0°90°1200-|||-100[38]压力角是在不考虑摩擦情况下作用力和力作用点的( )方向所夹的锐角。法线速度加速度切线[39]双曲柄机构( )死点。存在可能存在不存在[40]对于双摇杆机构,如取不同构件为机架,( )使其成为曲柄摇杆机构。一定有可能不能[41]铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到( )机构。曲柄摇杆双曲柄双摇杆[42]当急回特性系数为( )时,曲柄摇杆机构才有急回运动。K<1K=1K>1[43]曲柄摇杆机构只有当( )为主动件时,才会出现“死点”位置。连杆机架曲柄摇杆[44]当曲柄的极位夹角为( )时,曲柄摇杆机构才有急回运动。θ<0ºθ > 0ºθ=0º[45]平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做( )。曲柄摇杆机构双曲柄机构双摇杆机构[46]平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆长度之和,最短杆是连杆,这个机构叫做( )。曲柄摇杆机构双曲柄机构双摇杆机构[47]对于双摇杆机构,最短构件与最长构件长度之和( )大于其余两构件长度之和。一定不一定一定不[48]铰链四杆机构的压力角是指在不计摩擦情况下,连杆作用于( )上的力与该力作用点速度间所夹的锐角。主动件从动件机架连架杆[49]当四杆机构处于死点位置时,机构的压力角( )。为0°为90°与构件尺寸有关[50]曲柄滑块机构的死点只能发生在( )。曲柄主动时滑块主动时[51]若将一曲柄摇杆机构转化为双曲柄机构,可将原机构( )。曲柄作为机架连杆作为机架摇杆作为机架曲柄或连杆作为机架[52]当曲柄摇杆机构处于死点位置时,其值等于零的角度是( )。压力角传动角极位夹角[53]当曲柄为主动件时,曲柄摇杆机构的最小传动角γmin总是出现在( )成一条直线时。连杆与曲柄连杆与机架曲柄与机架[54]在设计铰链四杆机构时,应使最小传动角( )。γmin尽可能小一些γmin=0°γmin尽可能大一些γmin=45°[55]当导杆处于极限位置时,摆动导杆机构的导杆( )与曲柄垂直。一定不一定一定不[56]曲柄为原动件的曲柄摇杆机构,已知摇杆的行速比系数K=1.5,那么,极位夹角为( )。18°-18°36°72°[57]在铰链四杆机构中,机构的传动角γ与压力角α的关系是( )。γ=αγ=90°-αγ=90°+αγ=180°-α
二、选择题
[1]曲柄[1]摇杆机构中“死点[2]”产生的根本原因是( )。
A. 没有在曲柄上装一飞轮B. 摇杆为主动件
C. 施与从动件的力其作用线通过从动件的旋转中心
D. [2]在下列平面四杆机构中,无论以哪一构件为主动件,都不存在死点位置( )。
E. 曲柄摇杆机构
F. 双摇杆机构
G. 双曲柄机构
[3]曲柄摇杆机构中,摇杆为主动件时,( )死点位置。
不存在
曲柄与连杆[3]共线时为
摇杆与连杆共线时为
[4]下列铰链四杆机构中,能实现急回运动的是( )。
双摇杆机构
曲柄摇杆机构
双曲柄机构
对心曲柄滑块机构
[5]在曲柄摇杆机构中,为提高机构的传力性能,应该( )。
增大传动角γ
减小传动角γ
增大压力角α
减小极位夹角θ
[6]在双曲柄机构中,已知三杆长度为a=80mm,b=150mm,c=120mm,则d 杆长度为( )。
<110mm
110mm≤d≤190mm
≥190mm
[7]一曲柄摇杆机构,若改为以曲柄为机架,则将演化为( )。
曲柄摇杆机构
双曲柄机构
双摇杆机构
导杆机构
[8]铰链四杆机构ABCD中,AB为曲柄,CD为摇杆,BC为连杆。若杆长lAB=30mm,lBC=70mm,lCD=80mm,则机架最大杆长为( )。
80mm
100mm
120mm
150mm
[9]在下列平面四杆机构中,一定无急回特性的机构是( )
曲柄摇杆机构
摆动导杆机构
对心曲柄滑块机构
偏置曲柄滑块机构
[10]工程中常借用( )使机构渡过死点。
飞轮
某机构
皮带轮
机轮
[11]曲柄摇杆机构中,若曲柄为主动件时,其最小传动角的位置在( )位置之一。
曲柄与机架的两个共线
摇杆的两个极限
曲柄与连杆的两个共线
[12]平面四杆机构中,最长杆与最短杆长度之和大于其余两杆长度之和,只能得到( )机构。
双摇杆
双曲柄
曲柄摇杆
[13]平面连杆机构的急回特性可以缩短( ),提高生产效率。
非生产时间
生产时间
[14]曲柄摇杆机构中,曲柄的长度为( )。
最长
最短
大于连杆长度[4]
大于摇杆长度
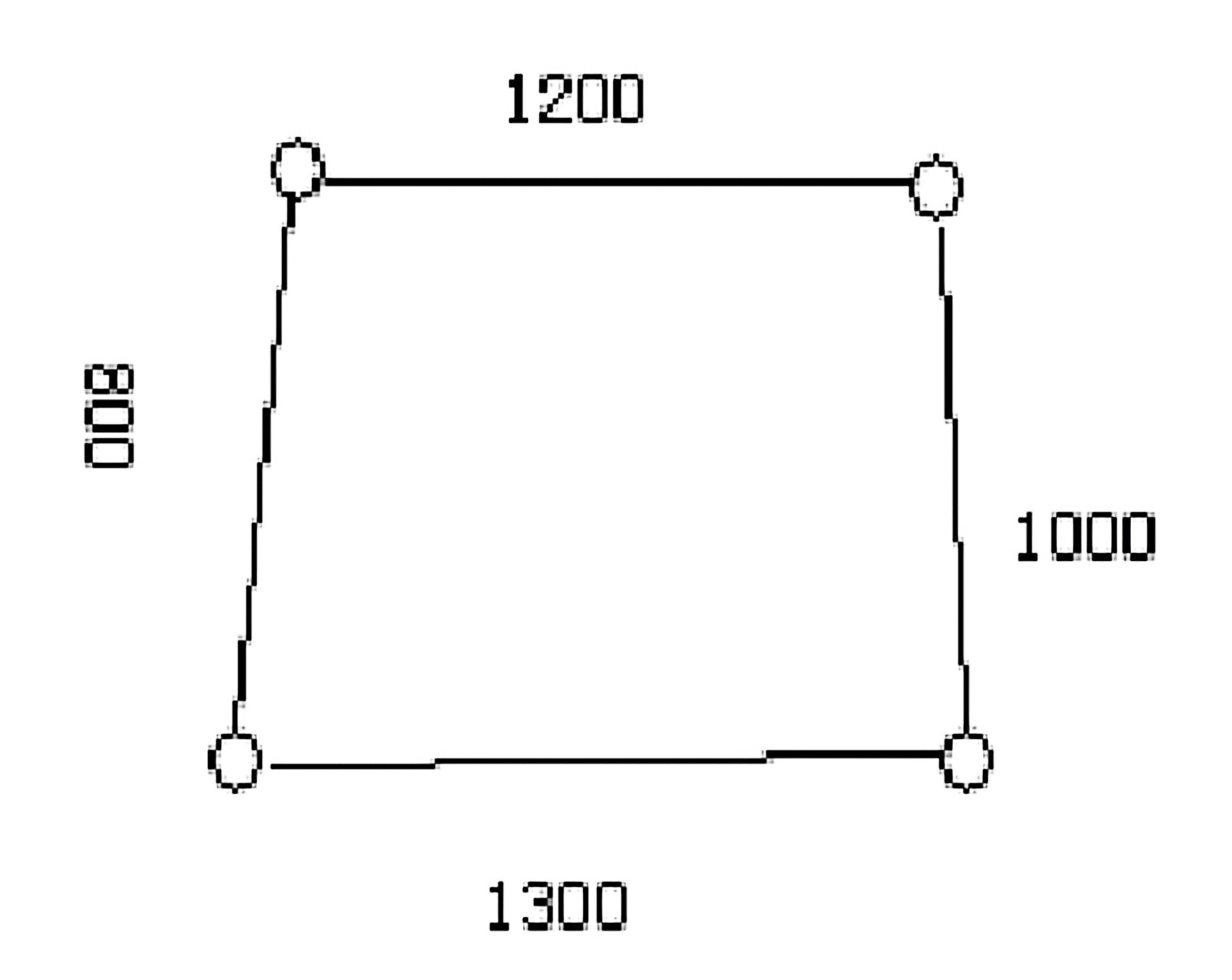
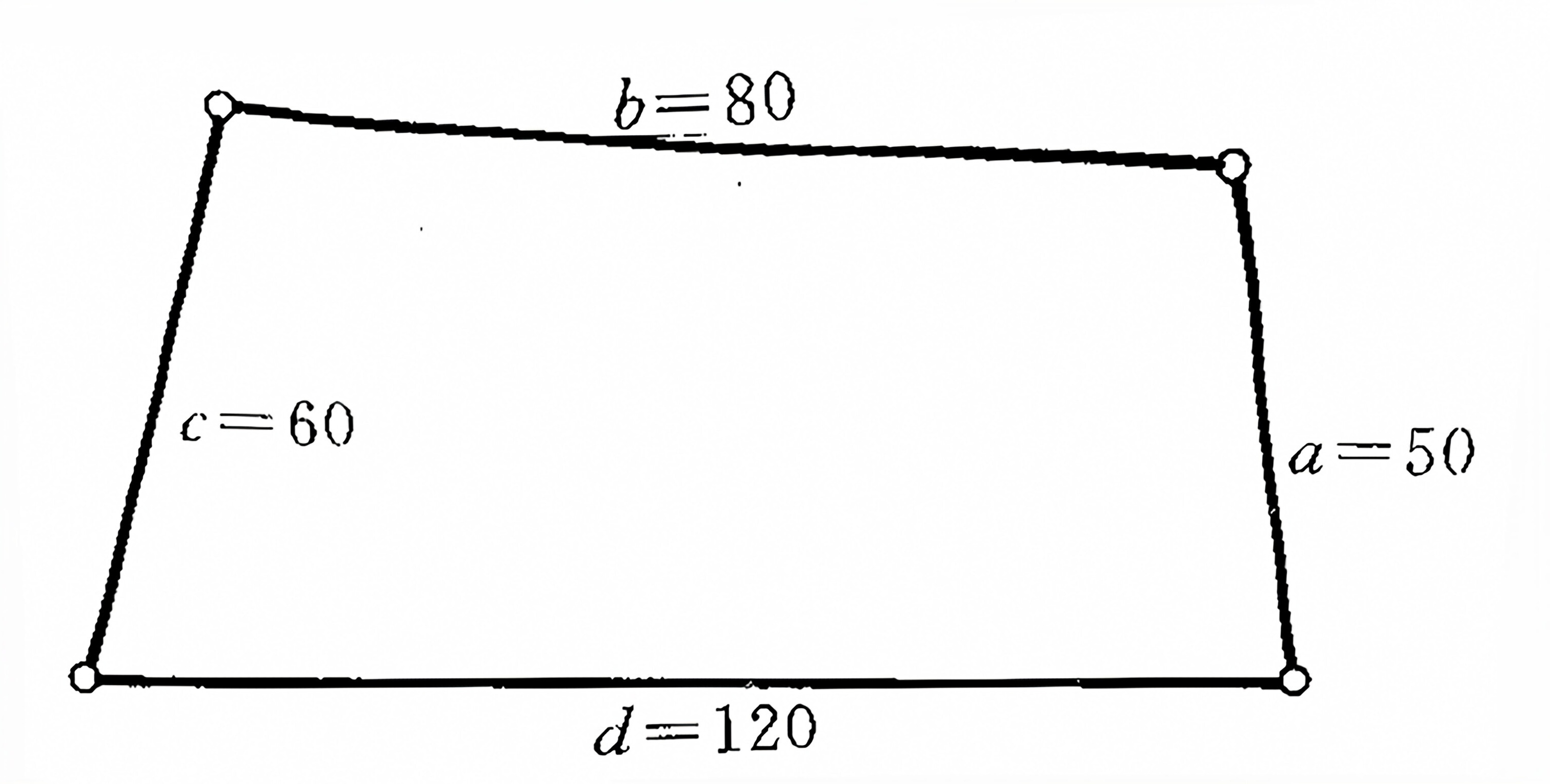
[15]各构件尺寸如图所示,则此机构为( )。
曲柄摇杆机构
双摇杆机构
条件不足不能确定
[16]在平面四杆机构中,压力角与传动角的关系为( )。
压力角增大则传动角减小
压力角增大则传动角也增大
压力角始终与传动角相等
[17]一铰链四杆机构四杆的长度分别为60、80、30、100mm,当以60 mm的杆(最短杆的邻边)为机架时,则该机构为( )机构。
曲柄摇杆
双曲柄
双摇杆
[18]铰链四杆机构中,能实现急回运动的是( )。
双曲柄机构
双摇杆机构
对心曲柄滑块机构
曲柄摇杆机构
[19]以下关于机构急回运动特性的论述正确的是( )
急回运动特性只有曲柄摇杆机构具有。
急回运动特性可用来缩短空回行程时间,提高生产率。
极位夹角等于零时,机构具有急回特性。
行程速比系数越小,急回特性越显著。
[20]曲柄摇杆机构中,曲柄为主动件时,( )死点位置。
曲柄与连杆共线时为
摇杆与连杆共线时
不存在
[21]铰链四杆机构ABCD中,AB为曲柄,CD为摇杆,BC为连杆。若杆长lAB=30mm,lBC=70mm,lCD=80mm,则机架最大杆长为( )。
80mm
100mm
120mm
150mm
[22]四杆机构处于死点时,其传动角为( )。
介于0°~90°之间
0°
90°
45°
[23]下列机构中,传力性能最好的是( )。
曲柄摇杆机构
曲柄滑块机构
导杆机构
偏心轮机构
[24]在图示铰链四杆机构中,若以 a 杆为机架,则机构为( )。
曲柄摇杆机构
双摇杆机构
双曲柄机构
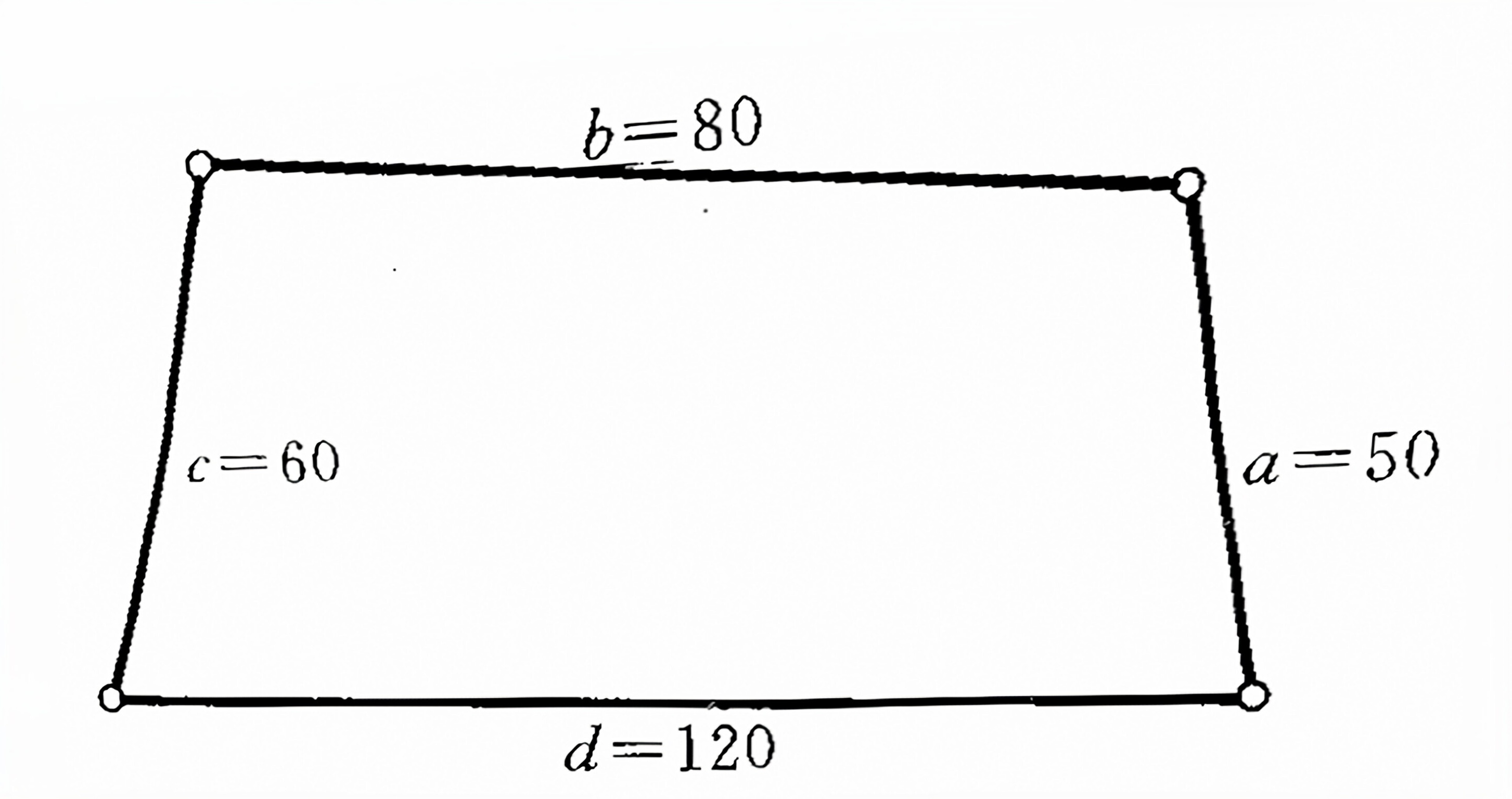
[25]在图示铰链四杆机构中,若b杆为机架,则机构为( )。
曲柄摇杆机构
双曲柄机构
双摇杆机构
[26]( )能把转动运动转变成往复摆动运动。
曲柄摇杆机构
双曲柄机构
双摇杆机构
曲柄滑块机构
[27]铰链四杆机构中存在曲柄时,曲柄( )是最短构件。
一定
不一定
一定不
[28]铰链四杆机构的压力角越大,对机构传力越( )。
有利
不利
无影响
[29]铰链四杆机构的压力角是指在不计摩擦和外力的条件下连杆作用于( )上的力与该力作用点的速度间所夹的锐角。
主动连架杆
从动连架杆
机架
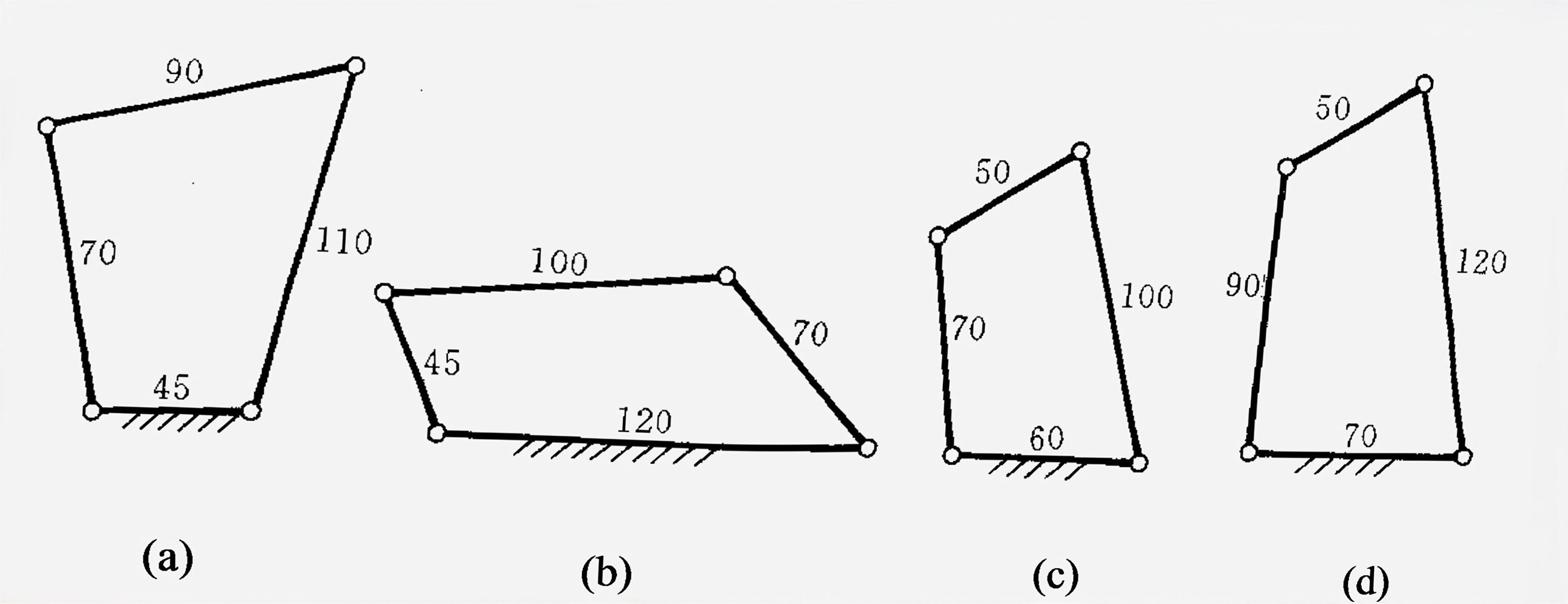
[30]下面四个机构运动简图所示的四个铰链四杆机构,图( )是双曲柄机构。
[31]已知一铰链四杆机构ABCD,lAB=25mm,lBC=50mm,lCD=40mm,lAD=30mm,且AD为机架那么,此机构为( )。
双曲柄机构
曲柄摇杆机构
双摇杆机构
[32]要将一个曲柄摇杆机构转化成双摇杆机构,可以用机架转换法将( )。
原机构的曲柄作为机架
原机构的连杆作为机架
原机构的摇杆作为机架
[33]连杆机构行程速比系数是指从动杆反、正行程( )。
瞬时速度的比值
最大速度的比值
平均速度的比值
[34]对心曲柄滑块机构以曲柄为原动件时,其最大传动角γmax为( )。
30°
45°
90°
[35]设计连杆机构时,为了具有良好的传动条件,应使( )。
传动角大一些,压力角小一些
传动角和压力角都小一些
传动角和压力角都大一些
[36]平行四杆机构工作时,其传动角( )。
始终保持为90°
始终是0°
是变化值
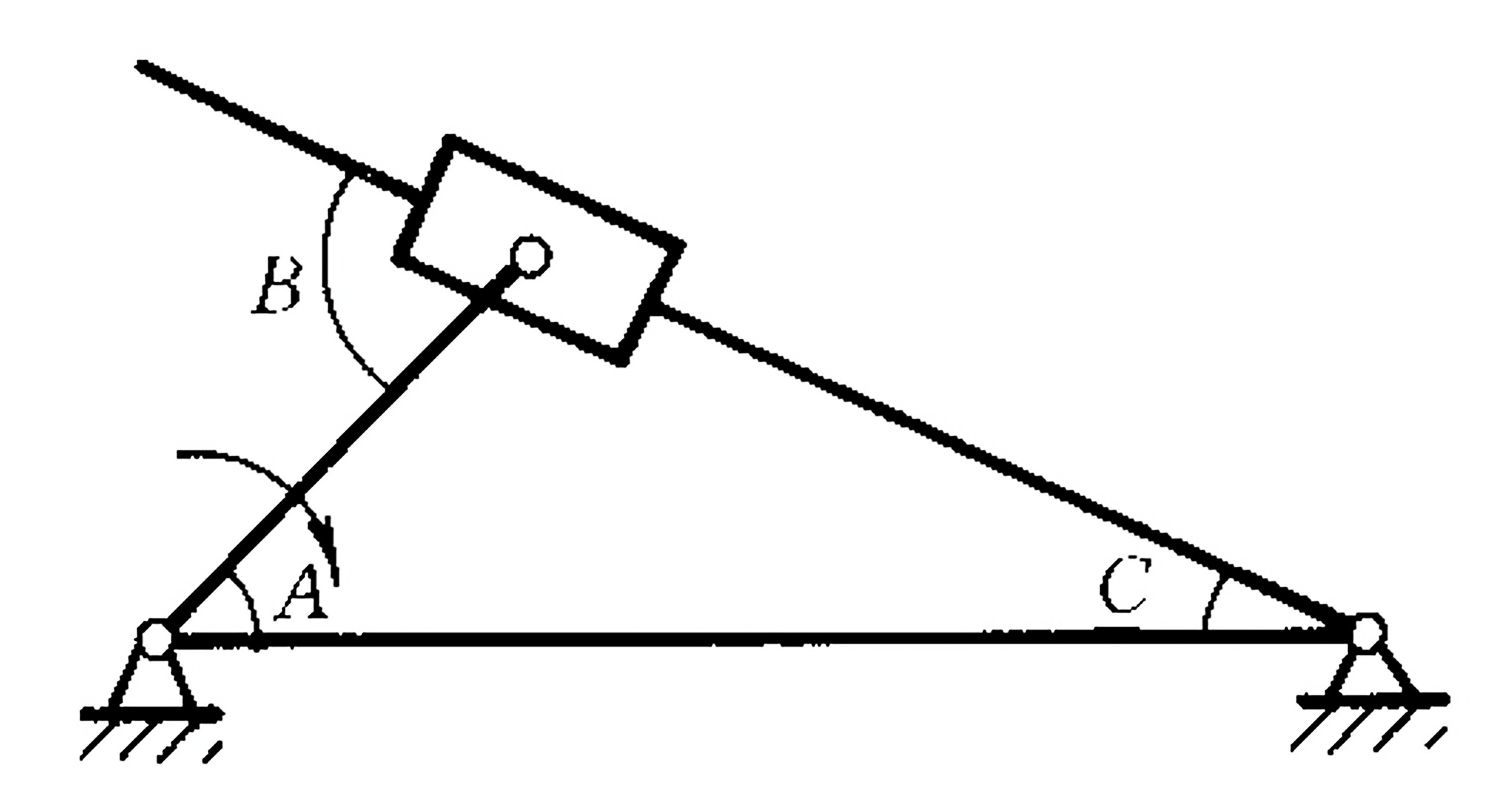
[37]下图所示的摆动导杆机构中,机构的传动角是( )。
角B
角C
0°
90°
[38]压力角是在不考虑摩擦情况下作用力和力作用点的( )方向所夹的锐角。
法线
速度
加速度
切线
[39]双曲柄机构( )死点。
存在
可能存在
不存在
[40]对于双摇杆机构,如取不同构件为机架,( )使其成为曲柄摇杆机构。
一定
有可能
不能
[41]铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到( )机构。
曲柄摇杆
双曲柄
双摇杆
[42]当急回特性系数为( )时,曲柄摇杆机构才有急回运动。
K<1
K=1
K>1
[43]曲柄摇杆机构只有当( )为主动件时,才会出现“死点”位置。
连杆
机架
曲柄
摇杆
[44]当曲柄的极位夹角为( )时,曲柄摇杆机构才有急回运动。
θ<0º
θ > 0º
θ=0º
[45]平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做( )。
曲柄摇杆机构
双曲柄机构
双摇杆机构
[46]平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆长度之和,最短杆是连杆,这个机构叫做( )。
曲柄摇杆机构
双曲柄机构
双摇杆机构
[47]对于双摇杆机构,最短构件与最长构件长度之和( )大于其余两构件长度之和。
一定
不一定
一定不
[48]铰链四杆机构的压力角是指在不计摩擦情况下,连杆作用于( )上的力与该力作用点速度间所夹的锐角。
主动件
从动件
机架
连架杆
[49]当四杆机构处于死点位置时,机构的压力角( )。
为0°
为90°
与构件尺寸有关
[50]曲柄滑块机构的死点只能发生在( )。
曲柄主动时
滑块主动时
[51]若将一曲柄摇杆机构转化为双曲柄机构,可将原机构( )。
曲柄作为机架
连杆作为机架
摇杆作为机架
曲柄或连杆作为机架
[52]当曲柄摇杆机构处于死点位置时,其值等于零的角度是( )。
压力角
传动角
极位夹角
[53]当曲柄为主动件时,曲柄摇杆机构的最小传动角γmin总是出现在( )成一条直线时。
连杆与曲柄
连杆与机架
曲柄与机架
[54]在设计铰链四杆机构时,应使最小传动角( )。
γmin尽可能小一些
γmin=0°
γmin尽可能大一些
γmin=45°
[55]当导杆处于极限位置时,摆动导杆机构的导杆( )与曲柄垂直。
一定
不一定
一定不
[56]曲柄为原动件的曲柄摇杆机构,已知摇杆的行速比系数K=1.5,那么,极位夹角为( )。
18°
-18°
36°
72°
[57]在铰链四杆机构中,机构的传动角γ与压力角α的关系是( )。
γ=α
γ=90°-α
γ=90°+α
γ=180°-α
题目解答
答案
D 、行程速 比 系数越小,急回特性越显著。