题目
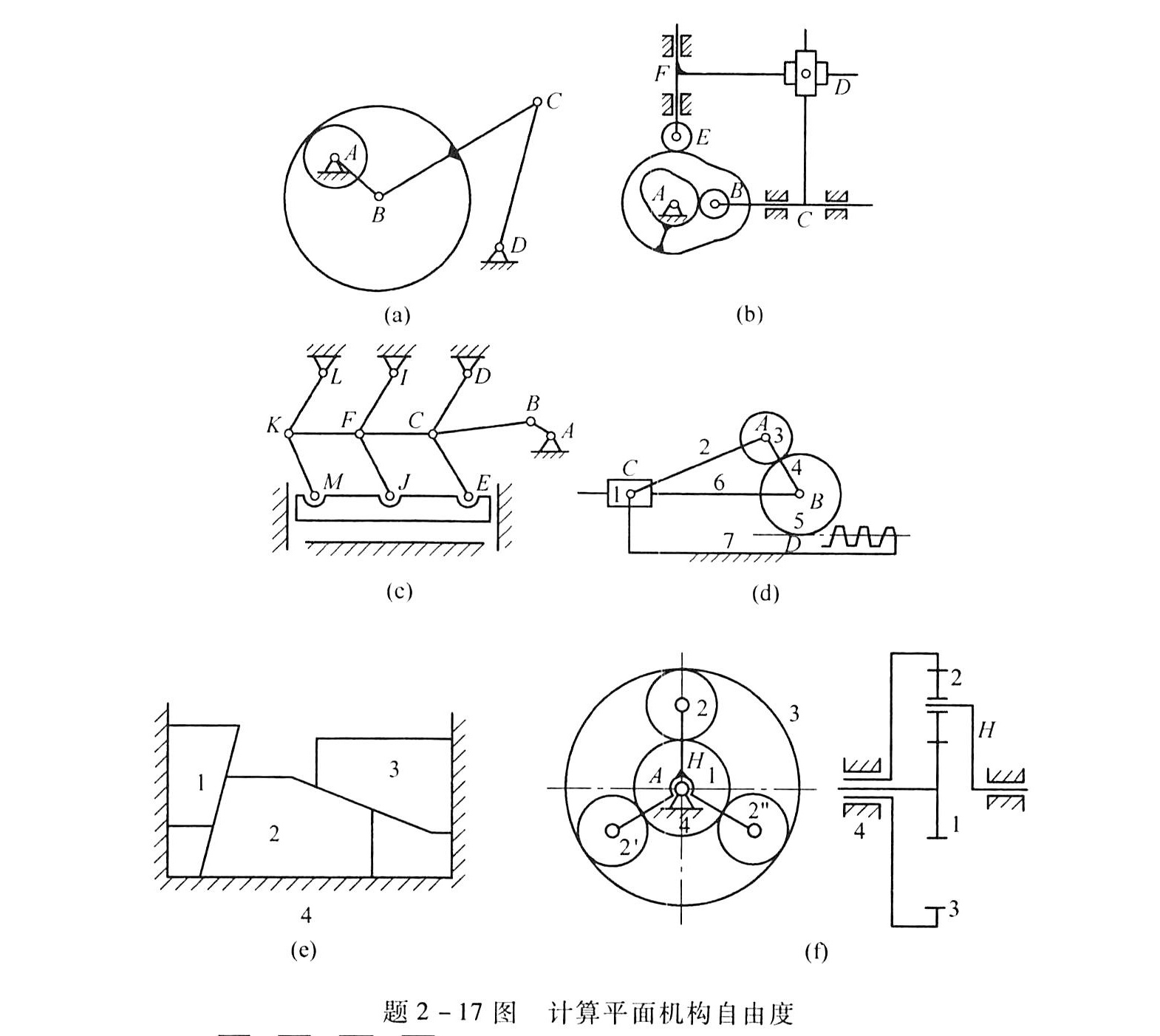
.2-17 .图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在D处为铰接在一起的两个滑-|||-块);图c为一精压机构;图e为一楔块机构;图f为一齿轮系机构。试计算如图所示各机构的自由度,并问在图-|||-d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同,为什么?.2-17 .图a、d为齿轮-连杆组合机构;图b为凸轮-连杆组合机构(图中在D处为铰接在一起的两个滑-|||-块);图c为一精压机构;图e为一楔块机构;图f为一齿轮系机构。试计算如图所示各机构的自由度,并问在图-|||-d所示机构中,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同,为什么?

题目解答
答案

解析
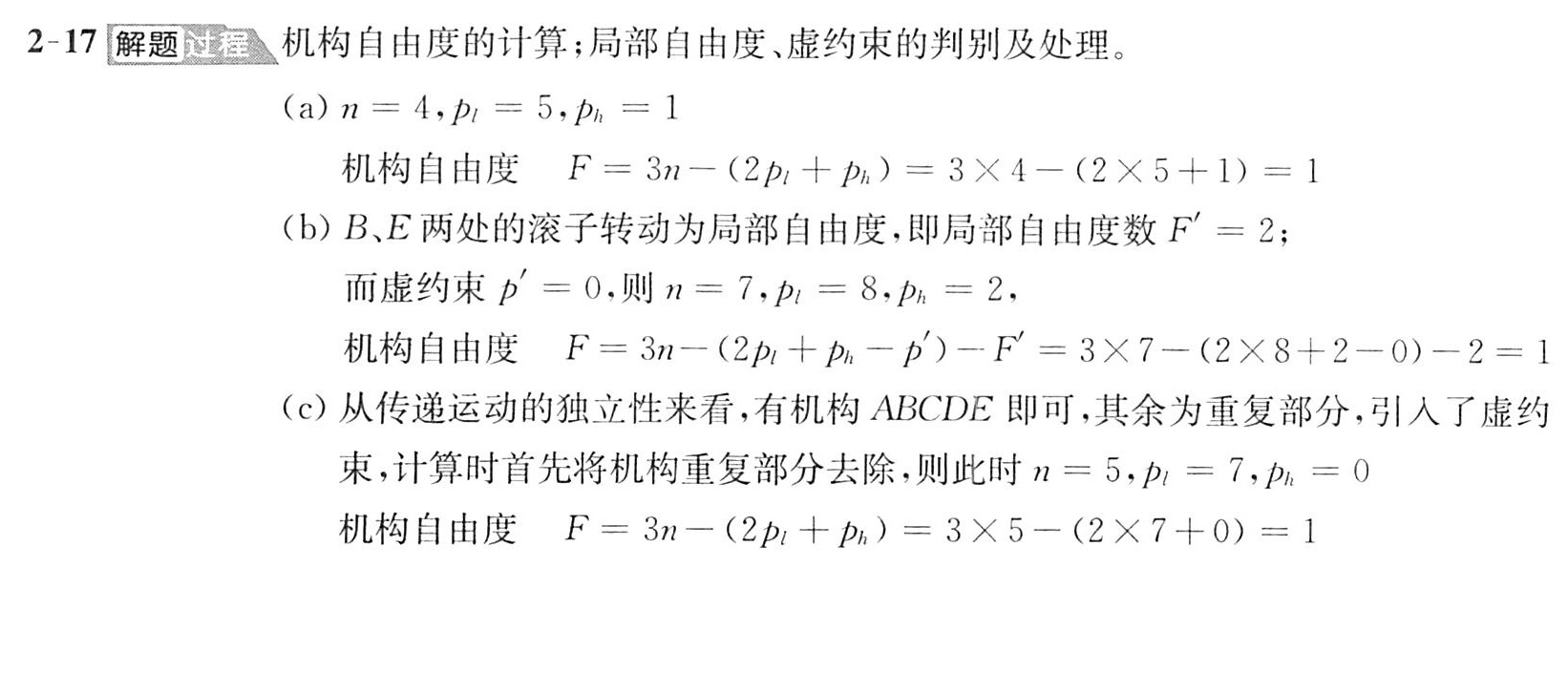
步骤 1:计算图a的自由度
图a中,有4个活动构件,5个低副,1个高副。根据平面机构自由度计算公式:
\[ F = 3n - (2p_1 + p_2) \]
其中,n为活动构件数,$p_1$为低副数,$p_2$为高副数。
代入数值:
\[ F = 3 \times 4 - (2 \times 5 + 1) = 12 - 11 = 1 \]
步骤 2:计算图b的自由度
图b中,有7个活动构件,8个低副,2个高副。同时,B、E两处的滚子转动为局部自由度,即局部自由度数 $F' = 2$;而虚约束 $p' = 0$。
代入数值:
\[ F = 3 \times 7 - (2 \times 8 + 2) - 2 = 21 - 18 - 2 = 1 \]
步骤 3:计算图c的自由度
图c中,有5个活动构件,7个低副,0个高副。计算时首先将机构重复部分去除。
代入数值:
\[ F = 3 \times 5 - (2 \times 7 + 0) = 15 - 14 = 1 \]
步骤 4:计算图d的自由度
图d中,有6个活动构件,7个低副,3个高副。
代入数值:
\[ F = 3 \times 6 - (2 \times 7 + 3) = 18 - 17 = 1 \]
步骤 5:分析图d中齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同
齿轮3、5啮合中心距不变,只算一个高副;而齿条7与齿轮5中心距变化在齿的两侧面保持接触,故为两个高副。因此,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目不同。
图a中,有4个活动构件,5个低副,1个高副。根据平面机构自由度计算公式:
\[ F = 3n - (2p_1 + p_2) \]
其中,n为活动构件数,$p_1$为低副数,$p_2$为高副数。
代入数值:
\[ F = 3 \times 4 - (2 \times 5 + 1) = 12 - 11 = 1 \]
步骤 2:计算图b的自由度
图b中,有7个活动构件,8个低副,2个高副。同时,B、E两处的滚子转动为局部自由度,即局部自由度数 $F' = 2$;而虚约束 $p' = 0$。
代入数值:
\[ F = 3 \times 7 - (2 \times 8 + 2) - 2 = 21 - 18 - 2 = 1 \]
步骤 3:计算图c的自由度
图c中,有5个活动构件,7个低副,0个高副。计算时首先将机构重复部分去除。
代入数值:
\[ F = 3 \times 5 - (2 \times 7 + 0) = 15 - 14 = 1 \]
步骤 4:计算图d的自由度
图d中,有6个活动构件,7个低副,3个高副。
代入数值:
\[ F = 3 \times 6 - (2 \times 7 + 3) = 18 - 17 = 1 \]
步骤 5:分析图d中齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目是否相同
齿轮3、5啮合中心距不变,只算一个高副;而齿条7与齿轮5中心距变化在齿的两侧面保持接触,故为两个高副。因此,齿轮3、5和齿条7与齿轮5的啮合高副所提供的约束数目不同。