题目
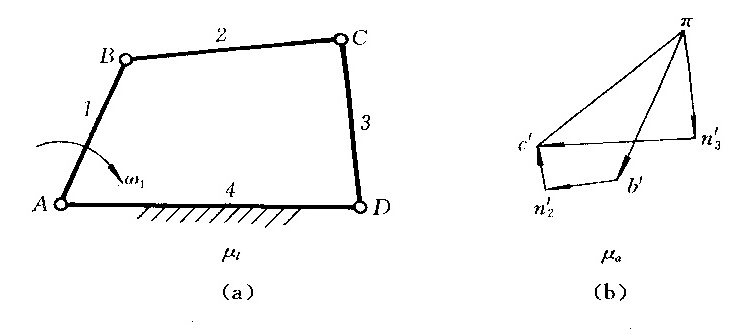
已知铰链四杆机构的位置(图a)及其加速度矢量多边形(图b),试根据图b写出构件2与构件3的角加速度、的表达式,并在图a上标出它们的方向。
已知铰链四杆机构的位置(图a)及其加速度矢量多边形(图b),试根据图b写出构件2与构件3的角加速度 、
、 的表达式,并在图a上标出它们的方向。
的表达式,并在图a上标出它们的方向。
题目解答
答案
, 逆 时 针 方 向
, 逆 时 针 方 向
解析
考查要点:本题主要考查铰链四杆机构的加速度分析,重点在于利用加速度矢量多边形确定构件的角加速度大小及方向。
解题核心思路:
- 角加速度与切向加速度的关系:角加速度 $\alpha$ 可通过切向加速度 $a_t$ 与转动半径 $r$ 的比值计算,即 $\alpha = \frac{a_t}{r}$。
- 方向判断:加速度矢量的方向需与构件的转动方向一致,若加速度矢量指向与逆时针转动方向一致,则角加速度为逆时针方向。
破题关键点:
- 明确构件的转动中心(如连杆2绕点B转动,连杆3绕点C转动)。
- 从加速度矢量多边形中提取对应点的切向加速度分量,并结合转动半径计算角加速度。
构件2的角加速度 $\alpha_2$
- 转动中心:连杆2绕点B转动。
- 切向加速度:在加速度矢量多边形中,点B的切向加速度为 $a_{t2}$。
- 转动半径:点B到转动中心的距离为 $r_2$。
- 角加速度表达式:
$\alpha_2 = \frac{a_{t2}}{r_2}$ - 方向:若 $a_{t2}$ 的方向与逆时针转动方向一致,则 $\alpha_2$ 为逆时针方向。
构件3的角加速度 $\alpha_3$
- 转动中心:连杆3绕点C转动。
- 切向加速度:在加速度矢量多边形中,点C的切向加速度为 $a_{t3}$。
- 转动半径:点C到转动中心的距离为 $r_3$。
- 角加速度表达式:
$\alpha_3 = \frac{a_{t3}}{r_3}$ - 方向:若 $a_{t3}$ 的方向与逆时针转动方向一致,则 $\alpha_3$ 为逆时针方向。