题目
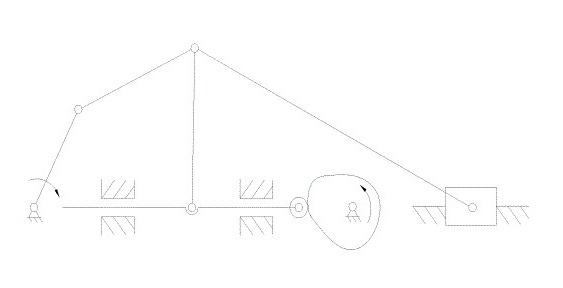
(15分)。指出下面机构运动简图中的复合铰链、局部自由度和虚约束,并计算机构的自由度,并判断机构是否具有确定的相对运动。
(15分)。
指出下面机构运动简图中的复合铰链、局部自由度和虚约束,并计算机构的自由度,并判断机构是否具有确定的相对运动。
题目解答
答案
n=7;
Pl=9 ;
Ph=1;
F=3 n-2 Pl-Ph;
=3×7-2×9-1;
=2;
因为原动件说明数目与自由度数相同,所以有确定的运动。
解析
步骤 1:识别复合铰链、局部自由度和虚约束
在机构运动简图中,复合铰链是指两个或两个以上构件在同一点上通过转动副连接。局部自由度是指某些构件的运动不会影响整个机构的运动。虚约束是指在机构中由于几何关系而重复的约束。
步骤 2:计算机构的自由度
机构自由度的计算公式为:F = 3n - 2Pl - Ph,其中n为活动构件数,Pl为低副数,Ph为高副数。
步骤 3:判断机构是否具有确定的相对运动
如果机构的自由度数等于原动件数,则机构具有确定的相对运动。
在机构运动简图中,复合铰链是指两个或两个以上构件在同一点上通过转动副连接。局部自由度是指某些构件的运动不会影响整个机构的运动。虚约束是指在机构中由于几何关系而重复的约束。
步骤 2:计算机构的自由度
机构自由度的计算公式为:F = 3n - 2Pl - Ph,其中n为活动构件数,Pl为低副数,Ph为高副数。
步骤 3:判断机构是否具有确定的相对运动
如果机构的自由度数等于原动件数,则机构具有确定的相对运动。