题目
三、矩形板ABCD支承如图所示,自重不计,E处为固定端约束,D,A为光滑铰链。已知:q=20kN/m,M=50kN·m,P=10kN。试求A,E处约束反力。q-|||-c -|||-A-|||-D-|||-4m以板ABCD为研究对象,受力如图(a)列平衡方程∑X=0 XD=0∑MD=0 NA·4-M-4q·2=0________________________∑Y=0 YD+NA-4q=0YD=27.5(kN)以杆ED为研究对象,受力如图(b)∑X=0________________________∑ME =0 ME-P·1-Y'D·2=0________∑Y=0 YE-Y'D-P=0________________________
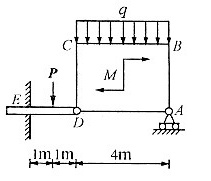
三、矩形板ABCD支承如图所示,自重不计,E处为固定端约束,D,A为光滑铰链。已知:q=20kN/m,M=50kN·m,P=10kN。试求A,E处约束反力。
以板ABCD为研究对象,受力如图(a)
列平衡方程
∑X=0 XD=0
∑MD=0 NA·4-M-4q·2=0
________________________
∑Y=0 YD+NA-4q=0
YD=27.5(kN)
以杆ED为研究对象,受力如图(b)
∑X=0________________________
∑ME =0 ME-P·1-Y'D·2=0
________
∑Y=0 YE-Y'D-P=0
________________________
题目解答
答案
N A =52.5(kN) X E =0 ME=65.5(kN·m) Y E =37.5(kN)
解析
考查要点:本题主要考查静力学中平面任意力系的平衡问题,涉及分布载荷、力偶及多物体系统平衡方程的建立与求解。
解题核心思路:
- 确定研究对象:优先选择矩形板ABCD作为整体分析,再对杆ED单独分析。
- 受力分析:明确各支座约束类型(固定端、光滑铰链),绘制受力图。
- 列平衡方程:对整体板ABCD列平面任意力系的平衡方程,求解A点反力;对杆ED列平衡方程,求解E点反力。
破题关键点:
- 分布载荷的等效简化:将均布载荷$q$转化为集中力,计算其作用位置。
- 力偶矩的正确处理:注意力偶$M$直接参与力矩平衡方程。
- 分阶段分析:先整体后局部,避免联立方程复杂化。
整体板ABCD的平衡分析
- 受力图:板受均布载荷$q=20\ \text{kN/m}$(作用于BC边,总力$4q=80\ \text{kN}$,作用点距D点2m),力偶$M=50\ \text{kN·m}$,A、D为光滑铰链(仅提供垂直反力$N_A, Y_D$)。
- 列平衡方程:
- ∑X=0:水平方向无外力,故$X_D=0$。
- ∑M_D=0:$N_A \cdot 4 - M - 4q \cdot 2 = 0$
代入数据:$N_A \cdot 4 - 50 - 80 \cdot 2 = 0 \Rightarrow N_A = \frac{50 + 160}{4} = 52.5\ \text{kN}$。 - ∑Y=0:$Y_D + N_A - 4q = 0$
代入数据:$Y_D + 52.5 - 80 = 0 \Rightarrow Y_D = 27.5\ \text{kN}$。
杆ED的平衡分析
- 受力图:杆受E点固定端约束(反力$X_E, Y_E, M_E$),D点垂直反力$Y'_D = Y_D = 27.5\ \text{kN}$,外力$P=10\ \text{kN}$。
- 列平衡方程:
- ∑X=0:$X_E = 0$。
- ∑M_E=0:$M_E - P \cdot 1 - Y'_D \cdot 2 = 0$
代入数据:$M_E - 10 \cdot 1 - 27.5 \cdot 2 = 0 \Rightarrow M_E = 10 + 55 = 65.5\ \text{kN·m}$。 - ∑Y=0:$Y_E - Y'_D - P = 0$
代入数据:$Y_E - 27.5 - 10 = 0 \Rightarrow Y_E = 37.5\ \text{kN}$。