题目
全国2018年4月自考机械设计基础考试真题答案及评分标准一、单项选择题:本大题共20小题,每小题2分,共40分。在每小题列出的备选项中-|||-只有一项是最符合题目要求的,请将其选出。-|||-1.在卷扬机传动示意图中,序号5、6所示部分属于-|||-A.动力部分 B.传动部分-|||-C.控制部分 D.执行部分-|||-2 3/ 4 5 6-|||-7-|||-1-电动机 2- 联轴器3一齿轮传动4一联轴器5-卷筒6一钢丝绳7一制动器-|||-题1图-|||-2.一个作平面运动的自由构件具有自由度的个数是-|||-A.1 B.2-|||-C.3 D.4-|||-3.下列参数中,数值越大对铰链四杆机构的传动越有利的是-|||-A.压力角 B.传动角-|||-C.极位夹角 D.摆角一、单项选择题:本大题共20小题,每小题2分,共40分。在每小题列出的备选项中-|||-只有一项是最符合题目要求的,请将其选出。-|||-1.在卷扬机传动示意图中,序号5、6所示部分属于-|||-A.动力部分 B.传动部分-|||-C.控制部分 D.执行部分-|||-2 3/ 4 5 6-|||-7-|||-1-电动机 2- 联轴器3一齿轮传动4一联轴器5-卷筒6一钢丝绳7一制动器-|||-题1图-|||-2.一个作平面运动的自由构件具有自由度的个数是-|||-A.1 B.2-|||-C.3 D.4-|||-3.下列参数中,数值越大对铰链四杆机构的传动越有利的是-|||-A.压力角 B.传动角-|||-C.极位夹角 D.摆角一、单项选择题:本大题共20小题,每小题2分,共40分。在每小题列出的备选项中-|||-只有一项是最符合题目要求的,请将其选出。-|||-1.在卷扬机传动示意图中,序号5、6所示部分属于-|||-A.动力部分 B.传动部分-|||-C.控制部分 D.执行部分-|||-2 3/ 4 5 6-|||-7-|||-1-电动机 2- 联轴器3一齿轮传动4一联轴器5-卷筒6一钢丝绳7一制动器-|||-题1图-|||-2.一个作平面运动的自由构件具有自由度的个数是-|||-A.1 B.2-|||-C.3 D.4-|||-3.下列参数中,数值越大对铰链四杆机构的传动越有利的是-|||-A.压力角 B.传动角-|||-C.极位夹角 D.摆角一、单项选择题:本大题共20小题,每小题2分,共40分。在每小题列出的备选项中-|||-只有一项是最符合题目要求的,请将其选出。-|||-1.在卷扬机传动示意图中,序号5、6所示部分属于-|||-A.动力部分 B.传动部分-|||-C.控制部分 D.执行部分-|||-2 3/ 4 5 6-|||-7-|||-1-电动机 2- 联轴器3一齿轮传动4一联轴器5-卷筒6一钢丝绳7一制动器-|||-题1图-|||-2.一个作平面运动的自由构件具有自由度的个数是-|||-A.1 B.2-|||-C.3 D.4-|||-3.下列参数中,数值越大对铰链四杆机构的传动越有利的是-|||-A.压力角 B.传动角-|||-C.极位夹角 D.摆角一、单项选择题:本大题共20小题,每小题2分,共40分。在每小题列出的备选项中-|||-只有一项是最符合题目要求的,请将其选出。-|||-1.在卷扬机传动示意图中,序号5、6所示部分属于-|||-A.动力部分 B.传动部分-|||-C.控制部分 D.执行部分-|||-2 3/ 4 5 6-|||-7-|||-1-电动机 2- 联轴器3一齿轮传动4一联轴器5-卷筒6一钢丝绳7一制动器-|||-题1图-|||-2.一个作平面运动的自由构件具有自由度的个数是-|||-A.1 B.2-|||-C.3 D.4-|||-3.下列参数中,数值越大对铰链四杆机构的传动越有利的是-|||-A.压力角 B.传动角-|||-C.极位夹角 D.摆角
全国2018年4月自考机械设计基础考试真题答案及评分标准
题目解答
答案
答案
解析
本套试题涵盖机械设计基础的核心知识点,包括机械组成、机构自由度、四杆机构、凸轮机构、螺纹连接、齿轮传动、蜗杆传动、轴承及联轴器等内容,重点考查对基础概念的理解与应用能力。
一、单项选择题解析
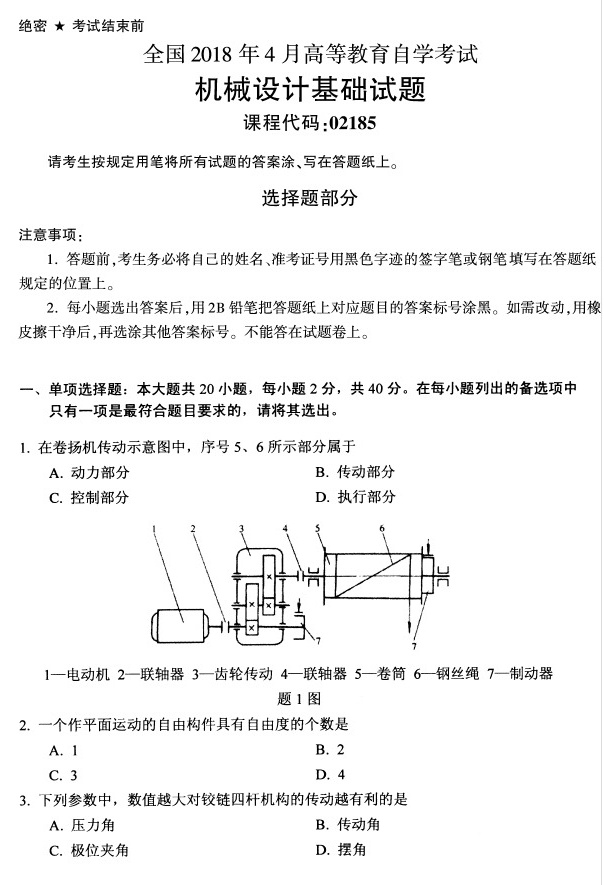
- 题目1:卷扬机中卷筒(5)和钢丝绳(6)属于执行部分,直接完成提升任务,选D。
- 题目2:平面自由构件有3个自由度(x、y方向移动和绕z轴转动),选C。
- 题目3:传动角越大,传动效率越高,对传动越有利;压力角越小越好,极位夹角影响急回特性,选B。
- 题目4:最短杆与最长杆之和小于其余两杆之和时,取最短杆相对杆为机架得双摇杆机构,选C。
- 题目5:凸轮轮廓形状决定从动件运动规律,选B。
- 题目6:自行车后链轮的超越离合器是棘轮机构,实现单向传动,选C。
- 题目7:梯形螺纹传动效率高、强度好,是最常用的传动螺纹,选B。
- 题目8:普通平键工作面是两侧面,选C。
- 题目9:带传动中,紧边绕入小带轮处应力最大(拉应力+弯曲应力+离心应力),选D。
- 题目10:渐开线齿轮连续传动条件是重合度ε≥1,选B。
- 题目11:直齿锥齿轮标准模数取大端模数,选A。
- 题目12:齿轮要求齿面硬(耐磨)、齿芯韧(抗冲击),选D。
- 题目13:蜗杆头数z1越大,传动效率越高,选A。
- 题目14:蜗杆传动允许润滑油工作温度为70℃~75℃,选C。
- 题目15:联轴器和离合器的核心作用是连接两轴传递转矩,选B。
- 题目16:自行车前轮轮轴只承受弯矩,是心轴,选A。
- 题目17:锡基轴承合金用于轴承衬,减磨性好,选C。
- 题目18:深沟球轴承代号:6(类型)+2(直径系列)+20(内径100mm)+P0(0级公差),选D。
- 题目19:滚动轴承正常失效形式是点蚀,选A。
- 题目20:周期性速度波动因瞬时功率不等,用飞轮调节,选B。
二、填空题解析
- 高副约束数:1个(仅约束一个方向运动)。
- 急回特性条件:极位夹角(θ≠0)。
- 凸轮分类:盘形凸轮(最常见)。
- 螺纹效率:螺纹升角(提高升角可降低自锁性,提高效率)。
- 链传动功率:链节距越大,传递功率越大。
- 斜齿轮标准模数:法面模数(制造标准)。
- 蜗杆传动啮合条件:蜗杆导程角(γ)等于蜗轮螺旋角(β)。
- 联轴器选择参数:转矩(核心传递参数)。
- 非液体润滑轴承失效:胶合(摩擦过热)。
- 调节周期性波动:飞轮(储存动能,平滑速度)。
三、分析题解析
-
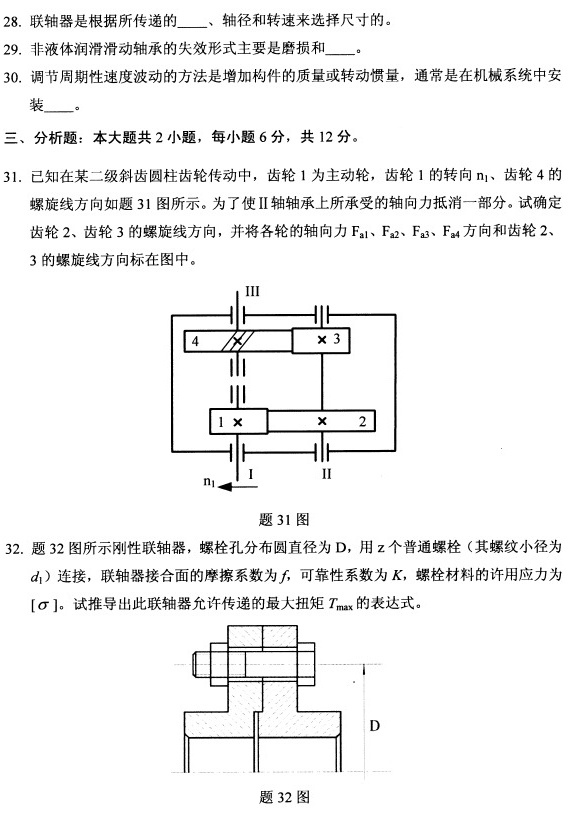
斜齿轮轴向力方向:
- 主动轮1右旋:轴向力方向由螺旋线方向和转向决定(右旋用右手,四指转向n1,拇指指向为Fa1方向,图中向左)。
- 齿轮2:与齿轮1啮合,为抵消Ⅱ轴轴向力,齿轮2应取左旋(Fa2方向与Fa1相反,向右)。
- 齿轮3:与齿轮2啮合,取右旋(Fa3方向向左),与齿轮4的Fa4(向右)部分抵消。
- 轴向力方向:Fa1向左,Fa2向右,Fa3向左,Fa4向右。
-
联轴器最大扭矩推导:
- 每个螺栓预紧力产生的摩擦力矩:单个螺栓摩擦力$F_f = KfF_0$($F_0$为预紧力),总摩擦力矩$T = zF_f \cdot \frac{D}{2}$。
- 螺栓强度条件:$F_0 \leq \frac{\pi d_1^2}{4}[\sigma]$,代入得$T_{max} = \frac{\pi z f K D d_1^2}{8}[\sigma]$。
四、计算题解析
-
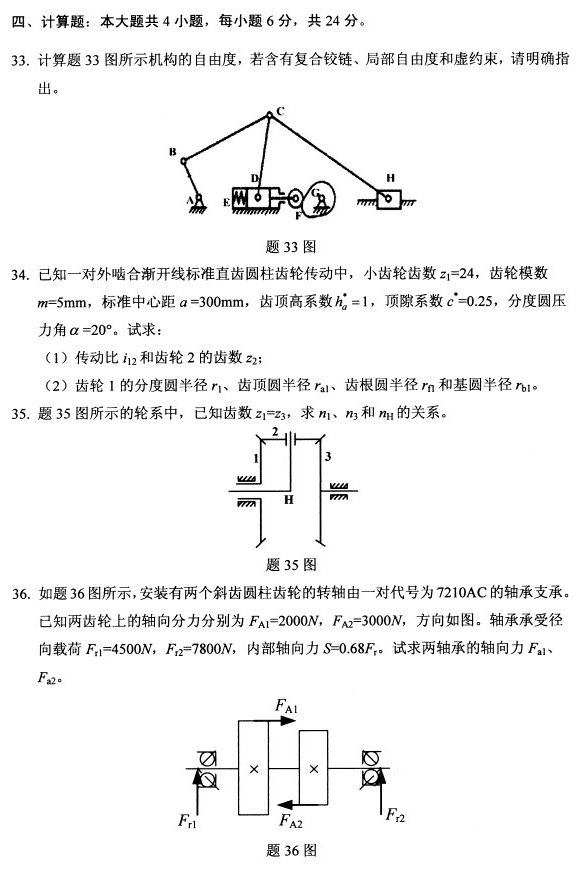
机构自由度计算:
- 活动构件数$n=7$,低副$PL=10$,高副$PH=0$。
- 自由度$F=3n-2PL-PH=3×7-2×10=1$,无复合铰链、局部自由度和虚约束。
-
齿轮传动计算:
- (1)中心距$a=\frac{m(z1+z2)}{2}→z2=\frac{2a}{m}-z1=120-24=96$,传动比$i=z2/z1=4$。
- (2)$r1=mz1/2=60mm$,$ra1=r1+mh_a=60+25=85mm$,$rf1=r1-h_a m - c'm=60-5-1.25=53.75mm$,$rb1=r1cosα=60×0.9397≈56.38mm$。
-
轮系传动比:
- 行星轮系中,$z1=z3$,设$nH$为系杆转速,$n1-nH=-(n3-nH)→n1+n3=2nH$。
-
轴承轴向力计算:
- 内部轴向力$S1=S2=0.68F_r$($F_r1=4500N→S1=3060N$,$F_r2=7800N→S2=5304N$)。
- 轴承1:$FA1=F_{A1}+S2=2000+5304=7304N$(方向向右)。
- 轴承2:$FA2=F_{A2}+S1=3000+3060=6060N$(方向向左)。