题目
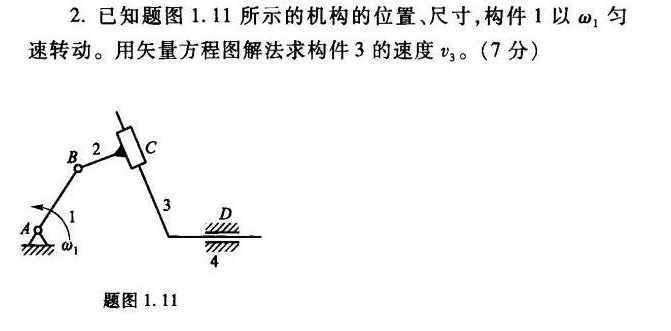
2.已知题图1.11所示的机构的位置、尺寸,构件1以w1匀-|||-速转动。用矢量方程图解法求构件3的速度v3。(7分)-|||-B 2 C-|||-A 么-|||-1-|||-3 D-|||-m-|||-4-|||-题图1.11
题目解答
答案
解析
考查要点:本题主要考查平面机构的速度分析,特别是矢量方程图解法的应用,涉及相对运动和瞬心法的综合运用。
解题核心思路:
- 确定各构件运动关系:构件1绕固定点A转动,构件2与3通过移动副连接,需分析点B2、B3的速度关系。
- 建立矢量方程:利用相对运动速度公式,将各点速度分解为绝对速度和相对速度。
- 几何关系与方向判断:结合导路方向(水平方向)和已知尺寸,通过速度多边形或几何关系求解未知速度大小和方向。
破题关键点:
- 正确选取瞬心:利用瞬心法确定速度方向和比例关系。
- 速度合成顺序:明确点B3的速度由点B2的速度和相对速度组成。
步骤1:分析已知条件与运动关系
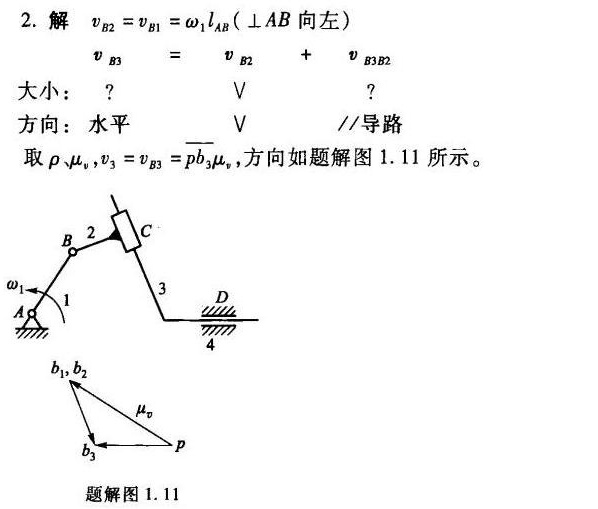
- 构件1以角速度$\omega_1$匀速转动,点B1的速度为$v_{B_1} = \omega_1 l_{AB}$,方向垂直于AB向左。
- 构件2与3通过移动副连接,点B2和B3的速度需满足$v_{B_3} = v_{B_2} + v_{B_3/B_2}$。
- 构件3的导路为水平方向,故$v_{B_3}$的水平分量即为$v_3$。
步骤2:建立矢量方程
- 绝对速度关系:
$v_{B_3} = v_{B_2} + v_{B_3/B_2}$
其中,$v_{B_3/B_2}$为相对速度,方向沿导路(水平方向)。 - 速度比例与方向:
- $v_{B_2}$方向垂直于AB向左,大小为$v_{B_1} = \omega_1 l_{AB}$。
- $v_{B_3}$需分解为水平方向的$v_3$和垂直方向的分量。
步骤3:几何关系求解
- 速度多边形构造:
- 取比例系数$\rho$,将速度矢量转化为几何线段。
- 点$\mu_0$为瞬心,对应速度为零的位置。
- 通过速度多边形确定$v_{B_3}$的大小和方向,最终得$v_3 = v_{B_3}$。