什么叫立体像对前方交会?描述立体像对前方交会的解算过程。利用立体像对两张像片的内方位元素,同名像点坐标和像对的相对方位元素(或外方位元素)解算模型点坐标(或地面点坐标)的工作。1.获取已知数据-|||-(x0,y0,f)A(X )(X x,xn,Z6,偶4,则2,x2)-|||-2.量测同名像点坐标 (x0,y )(x,y2)-|||-3.外方位线元素计算基线分量(B,B ∴B,)-|||-4 _{1)=(x)_(1)+(N)_(2)(y)_(1) (y)_(2)({V)_(4)}^2+(N)_(2)=(x)_(2)+(N)_(2)(y)_{2 . r=1/21α2·xx)+αn++x,x,解算过程:绝对定向:通过量取地面控制点对应的像点坐标解算模型的外方位元素,将模型纳入大地坐标。核线影像:在一个立体模型中,地面任意一点与两摄站中心构成平面(核面)与左右影像面的交线称左右核面。沿核线方向对原始影像重新采集的影像称核线影像。由此可见,位于同名核线上得像点不存在投影差。相对定向元素:确定一个立体像对两像片的相对位置的元素.绝对定向元素:描述立体相对在摄影瞬间的绝对位置和姿态的参数.单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线方程,反求该像片的外方位元素.空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标.解析空中三角测量:利用计算的方法,根据少量的地面控制点,按一定的数学模型,平差结算出待定点(或加密点)得平面位置和高程及每张像片的外方位元素的测量方法。数字地面模型:地表形态多种信息的数字表示数字摄影测量:基于数字影像与摄影测量的基本原理,应用计算机技术 数字影像处理 影像匹配 模式识别等多学科的理论与方法 提取所摄对象用数字表达的几何与物理信息的摄影测量的分支学科。数字影像内定向:是用于确定像片的扫描坐标系与像片坐标系之间的关系即数字摄影可能存在的变形像片纠正:消除因像片倾斜产生的像点位移,限制或消除因地面起伏产生的投影差,同时归化影像比例尺的工作。数字微分纠正:根据已知影像的内定向参数和外方位元素及数字高程模型,按一定的数学模型从原始非正射投影的数学影像获取正射影像像片调绘:经实地调查用规定符号绘出必要的地物、地貌并标记相关名称的像片双像解析摄影测量:按照立体像对与被摄物体的几何关系,以数学计算的方式,通过计算机解求被摄物体的三维空间坐标.影像的灰度:光学密度,D=lgO.数字影像的重采样:当欲知不位于矩阵点上的原始函数g(x,y)的数值时就需进航内插,此时称为重采样.影像匹配:利用互相关函数,评价两块影响的相似性以确定同名点.核线相关:沿核线寻找同名像点.数字正射影像图:(DigitalOrthophotoMap)DOM是以航摄像片或遥感影像(单色/彩色)为基础,经扫描处理并经逐像元进航辐射改正、微分纠正和镶嵌,按地形图范围裁剪成的影像数据,并将地形要素的信息以符号、线画、注记、公里格网、图廓(内/外)整饰等形式填加到该影像平面上,形成以栅格数据形式存储的影像数据库.立体像对:摄影测量中,用摄影机在两摄站点对同一景物摄得的有一定重叠度的两张像片.立体正射影像对:为了从立体观测中获得只管立体感,为正射影像制作出一副立体匹配片,正射影像和相应的立体匹配片共同称为立体正射影像对.数字相关:根据数字影像的灰度特性,利用计算机进航数值计算完成影像相关平差条件:利用已知控制点内业加密坐标与外业实测坐标相等相邻航带间公共连接点上的加密坐标应该相等平差目的:在全区域范围内吧航带网模型坐标视为观测值用最小二乘法整体解算个航带网的非线性变形改正系数最终计算出整个测区内所有加密点的地面测量坐标(1)4D产品是指________、________、________、________.(2)摄影测量按用途可分为________、________.(3)摄影测量学的发展经过了________、________、________三个阶段.(4)模拟摄影测量是利用________________________投影方法实现摄影过程的反转.(5)解析摄影测量以________为主要手段,通过对________的量测和________计算方法的交会方式来研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学.(6)数字摄影测量是基于摄影测量的基本原理,通过对所获取的________________________影像进航处理,自动(半自动)提取被摄对象用________方式表达的________信息,从而获得各种形式的数字产品和目视化产品.(7)共线方程表达的是________、________与________之间关系.(8)立体摄影测量基础是________方程.(9)摄影是根据________原理.(10)航空摄影是安装在航摄飞机上的________从空中一定角度对地面物体进航摄影,飞航航线一般为东西方向,要求航线相邻两张像片应有60%左右的重叠度,相邻航线的像片应有30%左右的重叠度,航摄机在摄影曝光的瞬间物镜主光轴保持________地面.(11)航摄像片为________像片,有________和________.(12)地图是地面的________投影,像片是地面的________投影.(13)在像空间坐标系中,像点的z坐标值都为________.(14)一张像片的外方位元素包括:三个直线元素(Xs、Ys、Zs):描述________;三个角元素(、、):描述________.(15)相对定向的理论基础、目的、标准是两像片上同名像点的投影光线________.(16)双像解析摄影测量的任务是利用解析计算方法处理________,获取________的三维空间信息.(17)摄影测量中,一个立体像对的同名像点在各自的像平面坐标系的x、y坐标之差,分别称为________视差、________视差.(18)解析法相对定向的理论基础是同名光线对对相交于________内.(19)解析绝对定向需要量测________个平高和________个高程以上的控制点,一般是在模型________布设________控制点.(20)解析空中三角测量按数学模型分为________.(21)根据选择的插值函数的不同,常用的影像重采样方法有________、________、________.(22)影像灰度的系统变形有两大类:________.(23)应用软件是解析测量软件、图像处理软件、模式识别软件的合集(24)像片纠正方法分类:光学机械纠正、光学微分纠正、数字微分纠正(25)反解法数字微分纠正四步骤:________
什么叫立体像对前方交会?描述立体像对前方交会的解算过程。
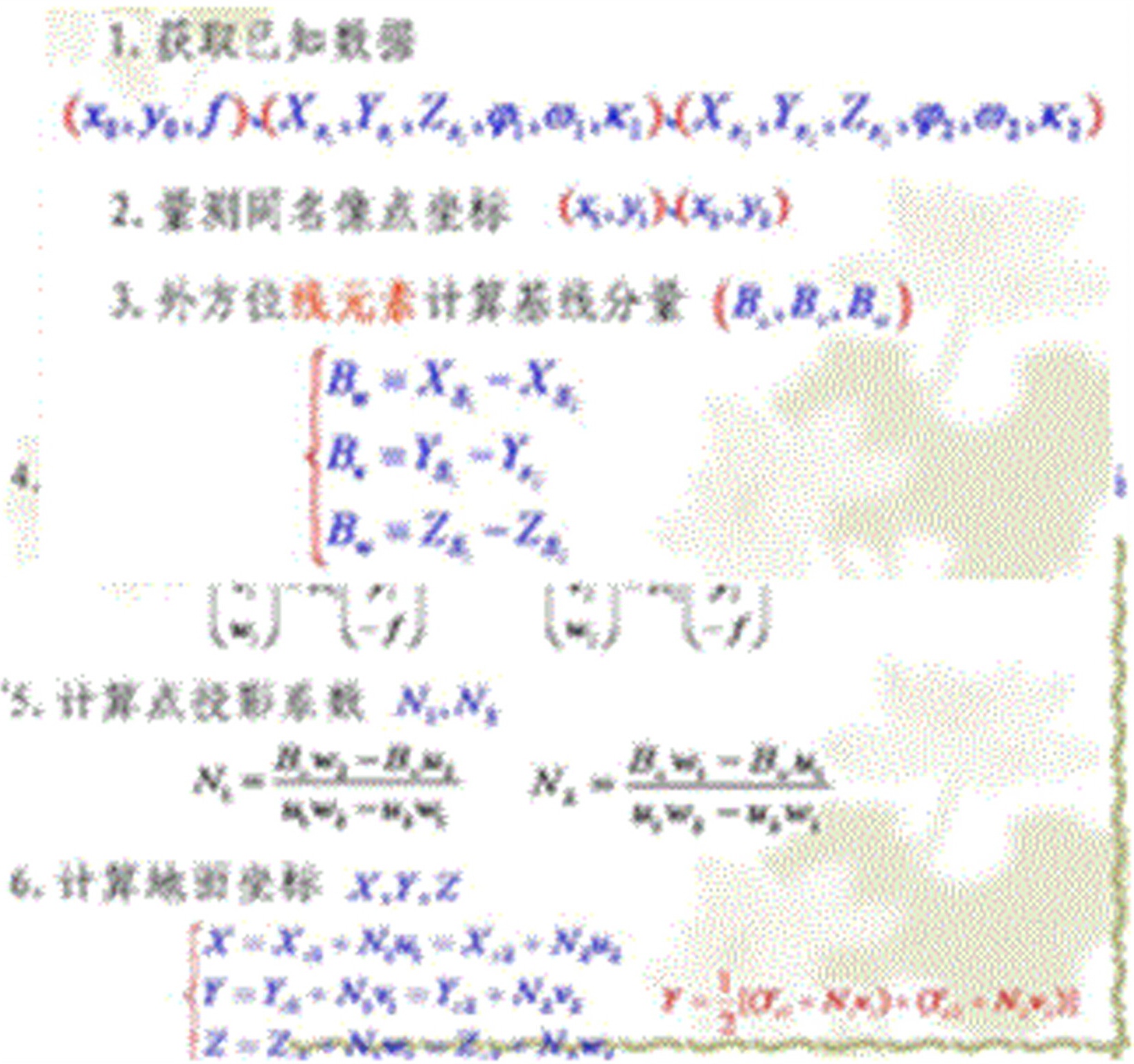
利用立体像对两张像片的内方位元素,同名像点坐标和像对的相对方位元素(或外方位元素)解算模型点坐标(或地面点坐标)的工作。
 解算过程:
解算过程:
绝对定向:通过量取地面控制点对应的像点坐标解算模型的外方位元素,将模型纳入大地坐标。
核线影像:在一个立体模型中,地面任意一点与两摄站中心构成平面(核面)与左右影像面的交线称左右核面。沿核线方向对原始影像重新采集的影像称核线影像。由此可见,位于同名核线上得像点不存在投影差。
相对定向元素:确定一个立体像对两像片的相对位置的元素.
绝对定向元素:描述立体相对在摄影瞬间的绝对位置和姿态的参数.
单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线方程,反求该像片的外方位元素.
空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标.
解析空中三角测量:利用计算的方法,根据少量的地面控制点,按一定的数学模型,平差结算出待定点(或加密点)得平面位置和高程及每张像片的外方位元素的测量方法。
数字地面模型:地表形态多种信息的数字表示
数字摄影测量:基于数字影像与摄影测量的基本原理,应用计算机技术 数字影像处理 影像匹配 模式识别等多学科的理论与方法 提取所摄对象用数字表达的几何与物理信息的摄影测量的分支学科。
数字影像内定向:是用于确定像片的扫描坐标系与像片坐标系之间的关系即数字摄影可能存在的变形
像片纠正:消除因像片倾斜产生的像点位移,限制或消除因地面起伏产生的投影差,同时归化影像比例尺的工作。
数字微分纠正:根据已知影像的内定向参数和外方位元素及数字高程模型,按一定的数学模型从原始非正射投影的数学影像获取正射影像
像片调绘:经实地调查用规定符号绘出必要的地物、地貌并标记相关名称的像片
双像解析摄影测量:按照立体像对与被摄物体的几何关系,以数学计算的方式,通过计算机解求被摄物体的三维空间坐标.
影像的灰度:光学密度,D=lgO.
数字影像的重采样:当欲知不位于矩阵点上的原始函数g(x,y)的数值时就需进航内插,此时称为重采样.
影像匹配:利用互相关函数,评价两块影响的相似性以确定同名点.
核线相关:沿核线寻找同名像点.
数字正射影像图:(DigitalOrthophotoMap)DOM是以航摄像片或遥感影像(单色/彩色)为基础,经扫描处理并经逐像元进航辐射改正、微分纠正和镶嵌,按地形图范围裁剪成的影像数据,并将地形要素的信息以符号、线画、注记、公里格网、图廓(内/外)整饰等形式填加到该影像平面上,形成以栅格数据形式存储的影像数据库.
立体像对:摄影测量中,用摄影机在两摄站点对同一景物摄得的有一定重叠度的两张像片.
立体正射影像对:为了从立体观测中获得只管立体感,为正射影像制作出一副立体匹配片,正射影像和相应的立体匹配片共同称为立体正射影像对.
数字相关:根据数字影像的灰度特性,利用计算机进航数值计算完成影像相关
平差条件:利用已知控制点内业加密坐标与外业实测坐标相等相邻航带间公共连接点上的加密坐标应该相等
平差目的:在全区域范围内吧航带网模型坐标视为观测值用最小二乘法整体解算个航带网的非线性变形改正系数最终计算出整个测区内所有加密点的地面测量坐标
(1)4D产品是指________、________、________、________.
(2)摄影测量按用途可分为________、________.
(3)摄影测量学的发展经过了________、________、________三个阶段.
(4)模拟摄影测量是利用________________________投影方法实现摄影过程的反转.
(5)解析摄影测量以________为主要手段,通过对________的量测和________计算方法的交会方式来研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学.
(6)数字摄影测量是基于摄影测量的基本原理,通过对所获取的________________________影像进航处理,自动(半自动)提取被摄对象用________方式表达的________信息,从而获得各种形式的数字产品和目视化产品.
(7)共线方程表达的是________、________与________之间关系.
(8)立体摄影测量基础是________方程.
(9)摄影是根据________原理.
(10)航空摄影是安装在航摄飞机上的________从空中一定角度对地面物体进航摄影,飞航航线一般为东西方向,要求航线相邻两张像片应有60%左右的重叠度,相邻航线的像片应有30%左右的重叠度,航摄机在摄影曝光的瞬间物镜主光轴保持________地面.
(11)航摄像片为________像片,有________和________.
(12)地图是地面的________投影,像片是地面的________投影.
(13)在像空间坐标系中,像点的z坐标值都为________.
(14)一张像片的外方位元素包括:三个直线元素(Xs、Ys、Zs):描述________;三个角元素(、、):描述________.
(15)相对定向的理论基础、目的、标准是两像片上同名像点的投影光线________.
(16)双像解析摄影测量的任务是利用解析计算方法处理________,获取________的三维空间信息.
(17)摄影测量中,一个立体像对的同名像点在各自的像平面坐标系的x、y坐标之差,分别称为________视差、________视差.
(18)解析法相对定向的理论基础是同名光线对对相交于________内.
(19)解析绝对定向需要量测________个平高和________个高程以上的控制点,一般是在模型________布设________控制点.
(20)解析空中三角测量按数学模型分为________.
(21)根据选择的插值函数的不同,常用的影像重采样方法有________、________、________.
(22)影像灰度的系统变形有两大类:________.
(23)应用软件是解析测量软件、图像处理软件、模式识别软件的合集
(24)像片纠正方法分类:光学机械纠正、光学微分纠正、数字微分纠正
(25)反解法数字微分纠正四步骤:________
题目解答
答案
DEM DLG DRG DOM 地形摄影测量 非地形摄影测量 模拟摄影测量 解析摄影测量 数字摄影测量 光学 / 机械 电子计算机 摄影像片 解析 数字 / 数字化 数字 几何与物理 像点 投影中心 地面点 共面条件 小孔成像 航摄仪 垂直 量测 光学框标 机械框标 正射 中心 -f 摄影中心的空间坐标值 像片的空间姿态 对对相交 立体像对 地面点 左右 上下 核面 2 1 四个角 四个 航带法、独立模型法、光束法 最邻近像元法 双线性内插法 双三次卷积法 辐射畸变、几何畸变 计算地面点坐标、计算像点坐标、灰度内插、灰度赋值
解析
本题主要考查摄影测量学的基本概念、原理及相关技术流程,涵盖了4D产品、摄影测量发展阶段、共线方程、外方位元素、相对定向与绝对定向、解析空中三角测量、影像重采样等多方面知识点。解题时需结合所学的摄影测量理论,对每个问题涉及的术语和定义进行准确回忆和匹配。