第8章平面连杆[1][1]机构及其设计I.填空题1在________条件下,曲柄[2][2]滑块机构具有急回特性。2机构中传动角和压力角之和等于_________。3在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得________机构。4平面连杆机构是由许多刚性构件用________联接而形成的机构。5在图示导杆机构中,AB为主动件时,该机构传动角的值为__。6在摆动导杆机构中,导杆摆角,其行程速度变化系数K的值为。7铰链四杆机构具有急回特性时其极位夹角值,对心曲柄滑块机构的值,所以它________急回特性,摆动导杆机构________急回特性。8对心曲柄滑块机构曲柄长为a,连杆长为b,则最小传动角等于,它出现在________位置。9在四连杆机构中,能实现急回运动的机构有(1)________(2)________(3)________。10铰链四杆机构有曲柄的条件是________,双摇杆机构存在的条件是________。(用文字说明)11图示运动链,当选择________杆为机架时为双曲柄机构;选择________杆为机架时为双摇杆机构;选择________________________杆为机架时则为曲柄摇杆机构。12在曲柄滑块机构中,若以曲柄为主动件、滑块为从动件,则不会出现“死点位置”,因最小传动角--,最大压力角________________;反之,若以滑块为主动件、曲柄为从动件,则在曲柄与连杆两次共线的位置,就是________,因为该处________-,--。13当铰链四杆机构各杆长为:mm,mm,mm,mm。则四杆机构就________。14当四杆机构的压力角=90时,传动角等于__,该机构处于________位置。15在曲柄摇杆机构中,最小传动角发生的位置在________。16通常压力角是指________间所夹锐角。17一对心式曲柄滑块机构,若以滑块为机架,则将演化成________机构。18铰链四杆机构变换机架(倒置)以后,各杆间的相对运动不变,原因是________。19铰链四杆机构连杆点轨迹的形状和位置取决于________个机构参数;用铰链四杆机构能精确再现________个给定的连杆平面位置。20铰链四杆机构演化成其它型式的四杆机构(1)________(2)________(3)________等三种方法。21图示为一偏置曲柄滑块机构。试问:AB杆成为曲柄的条件是:________________________;若以曲柄为主动件,机构的最大压力角=发生在AB垂直于滑块导路。22曲柄滑块机构是改变曲柄摇杆机构中的________而形成的。在曲柄滑块机构中改变________而形成偏心轮机构。在曲柄滑块机构中以________而得到回转导杆机构。23在图示铰链四杆机构中若使其成为双摇杆机构,则可将________固定作机架。24转动极点和固定位置的转动副连线一定是________的中线。II.判断题1任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。(N)2在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;而取导杆为原动件时,则机构有两个死点位置.( Y )3在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。(Y)4在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。(N)5铰链四杆机构是由平面低副组成的四杆机构。(Y)6任何平面四杆机构出现死点时,都是不利的,因此应设法避免。(N)7平面四杆机构有无急回特性取决于极位夹角是否大于零。(Y)8平面四杆机构的传动角在机构运动过程中是时刻变化的,为保证机构的动力性能,应限制其最小值不小于某一许用值。(Y)9在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角可能出现在曲柄与机架两个共线位置之一处。(Y )10在偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角可能出现在曲柄与机架(即滑块的导路)相平行的位置。(N)11摆动导杆机构不存在急回特性。(N)12增大构件的惯性,是机构通过死点位置的唯一办法。(N)13平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角(N)14双摇杆机构不会出现死点位置。(N)15凡曲柄摇杆机构,极位夹角必不等于0,故它总具有急回特征。(N)16图示铰链四杆机构ABCD中,可变长度的a杆在某种合适的长度下,它能获得曲柄摇杆机构(N)17曲柄摇杆机构只能将回转运动转换为往复摆动。(N)18在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。( N )19在单缸内燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。(N)20当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。(Y)21杆长不等的双曲柄机构无死点位置。(Y)22转动导杆机构中不论取曲柄或导杆为原动件,机构均无死点位置(Y)III.选择题1连杆机构行程速比系数是指从动杆反、正行程________。A)瞬时速度的比值;B)最大速度的比值;C)平均速度的比值。2铰链四杆机构中若最短杆和最长杆长度之和大于其他两杆长度之和时,则机构中_B_。A)一定有曲柄存在;B)一定无曲柄存在;C)是否有曲柄存在还要看机架是哪一个构件3平行四杆机构工作时,其传动角________。A)始终保持为;B)始终是;C)是变化值。4对心曲柄滑块机构以曲柄为原动件时,其最大传动角为________。A);B);C)。5设计连杆机构时,为了具有良好的传动条件,应使________。A)传动角大一些,压力角小一些;B)传动角和压力角都小一些;C)传动角和压力角都大一些。6在曲柄摇杆机构中,当摇杆为主动件,且________处于共线位置时,机构处于死点位置。A)曲柄与机架;B)曲柄与连杆;C)连杆与摇杆。7在摆动导杆机构中,当曲柄为主动件时,其传动角________变化的。A)是由小到大;B)是由大到小;C)是不。8在曲柄摇杆机构中,当曲柄为主动件,且________共线时,其传动角为最小值。A)曲柄与连杆;B)曲柄与机架;C)摇杆与机架。9下图所示的摆动导杆机构中,机构的传动角是________。(1)角A;(2)角B;(3)角C;(4);(5)。10压力角是在不考虑摩擦情况下作用力和力作用点的________方向所夹的锐角。A)法线;B)速度;C)加速度;D)切线。11为使机构具有急回运动,要求行程速比系数________。A)K=1;B)K1;C)K1。12铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到________机构。A)曲柄摇杆;B)双曲柄;C)双摇杆。13双曲柄机构________死点。A)存在;B)可能存在;C)不存在。14对于双摇杆机构,如取不同构件为机架,________使其成为曲柄摇杆机构。A)一定;B)有可能;C)不能。15铰链四杆机构中存在曲柄时,曲柄________是最短构件。A)一定;B)不一定;C)一定不。16要将一个曲柄摇杆机构转化成双摇杆机构,可以用机架转换法将________。A)原机构的曲柄作为机架;B)原机构的连杆作为机架;C)原机构的摇杆作为机架。17已知一铰链四杆机构ABCD,mm,mm,mm,mm,且AD为机架,BC为AD之对边,那么,此机构为________。
第8章平面连杆[1][1]机构及其设计
I.填空题
1在________条件下,曲柄[2][2]滑块机构具有急回特性。
2机构中传动角 和压力角
和压力角 之和等于________
之和等于________ _。
_。
 3在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得________机构。
3在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得________机构。
4平面连杆机构是由许多刚性构件用________联接而形成的机构。
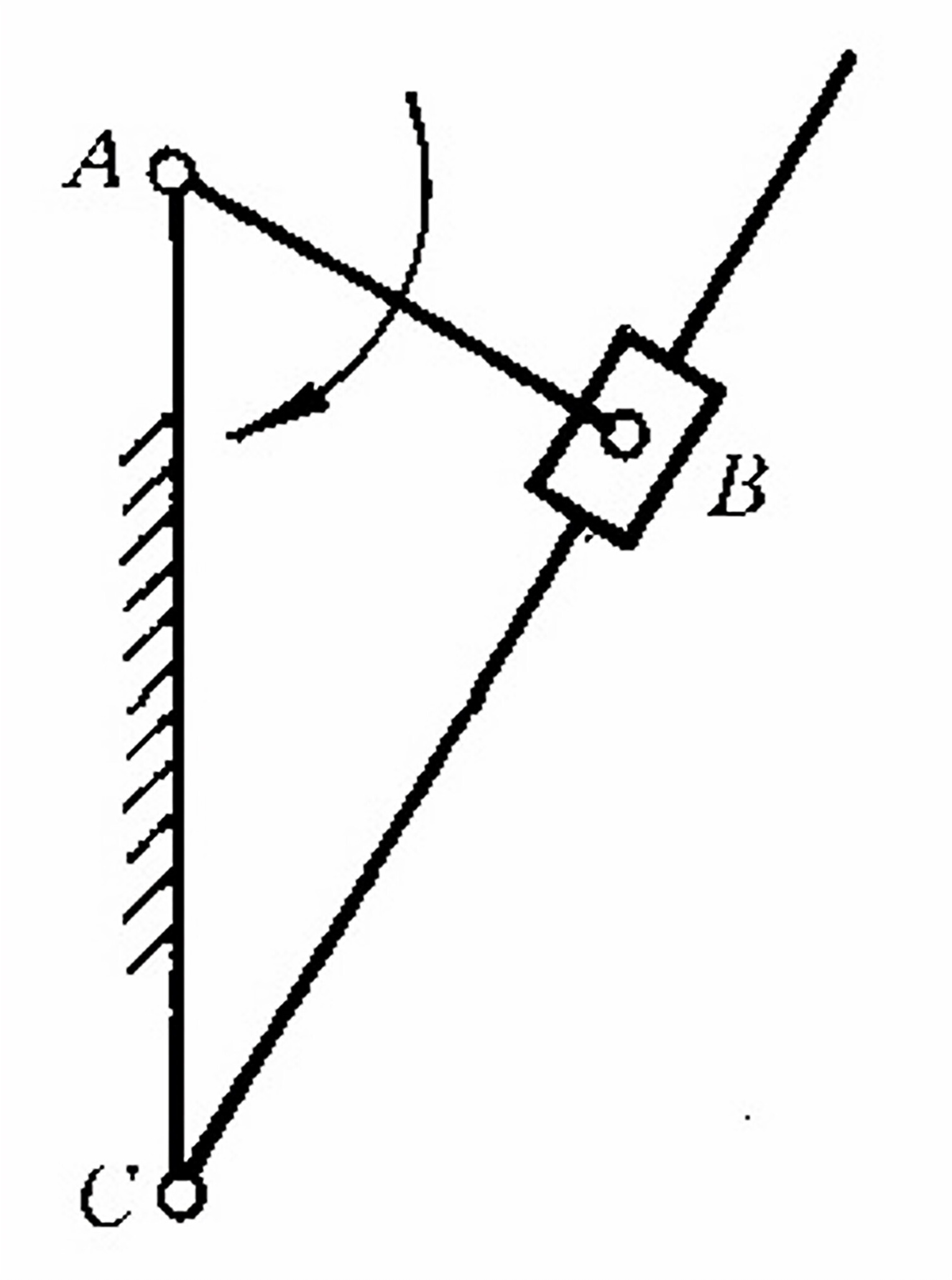
5在图示导杆机构中,AB为主动件时,该机构传动角的值为__。
6在摆动导杆机构中,导杆摆角 ,其行程速度变化系数K的值为
,其行程速度变化系数K的值为
 。
。
7铰链四杆机构具有急回特性时其极位夹角 值
值 ,对心曲柄滑块机构的值
,对心曲柄滑块机构的值 ,所以它________急回特性,摆动导杆机构________急回特性。
,所以它________急回特性,摆动导杆机构________急回特性。
8对心曲柄滑块机构曲柄长为a,连杆长为b,则最小传动角 等于
等于
,它出现在________位置。
9在四连杆机构中,能实现急回运动的机构有(1)________(2)________(3)________。
10铰链四杆机构有曲柄的条件是________,双摇杆机构存在的条件是________。(用文字说明)
 11图示运动链,当选择________杆为机架时为双曲柄机构;选择________杆为机架时为双摇杆机构;选择________________________杆为机架时则为曲柄摇杆机构。
11图示运动链,当选择________杆为机架时为双曲柄机构;选择________杆为机架时为双摇杆机构;选择________________________杆为机架时则为曲柄摇杆机构。
12在曲柄滑块机构中,若以曲柄为主动件、滑块为从动件,则不会出现“死点位置”,因最小传动角 --,最大压力角________________;反之,若以滑块为主动件、曲柄为从动件,则在曲柄与连杆两次共线的位置,就是________,因为该处________-,--。
--,最大压力角________________;反之,若以滑块为主动件、曲柄为从动件,则在曲柄与连杆两次共线的位置,就是________,因为该处________-,--。
13当铰链四杆机构各杆长为: mm,
mm, mm,
mm, mm,
mm, mm。则四杆机构就________。
mm。则四杆机构就________。
14当四杆机构的压力角=90时,传动角等于_ _,该机构处于________位置。
_,该机构处于________位置。
15在曲柄摇杆机构中,最小传动角发生的位置在________。
16通常压力角是指________间所夹锐角。
17一对心式曲柄滑块机构,若以滑块为机架,则将演化成________机构。
18铰链四杆机构变换机架(倒置)以后,各杆间的相对运动不变,原因是________。
19铰链四杆机构连杆点轨迹的形状和位置取决于________个机构参数;用铰链四杆机构能精确再现________个给定的连杆平面位置。
20铰链四杆机构演化成其它型式的四杆机构(1)________(2)________(3)________等三种方法。
21图示为一偏置曲柄滑块机构。试问:AB杆成为曲柄的条件是:________________________;若以曲柄为主动件,机构的最大压力角=发生在AB垂直于滑块导路。
 22曲柄滑块机构是改变曲柄摇杆机构中的________而形成的。在曲柄滑块机构中改变________而形成偏心轮机构。在曲柄滑块机构中以________而得到回转导杆机构。
22曲柄滑块机构是改变曲柄摇杆机构中的________而形成的。在曲柄滑块机构中改变________而形成偏心轮机构。在曲柄滑块机构中以________而得到回转导杆机构。
23在图示铰链四杆机构中若使其成为双摇杆机构,则可将________固定作机架。
24转动极点和固定位置的转动副连线一定是________的中线。
II.判断题
1任何一种曲柄滑块机构,当曲柄为原动件时,它的行程速比系数K=1。(N)
2在摆动导杆机构中,若取曲柄为原动件时,机构无死点位置;而取导杆为原动件时,则机构有两个死点位置.( Y )
3在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。(Y)
4在铰链四杆机构中,凡是双曲柄机构,其杆长关系必须满足:最短杆与最长杆杆长之和大于其它两杆杆长之和。(N)
5铰链四杆机构是由平面低副组成的四杆机构。(Y)
6任何平面四杆机构出现死点时,都是不利的,因此应设法避免。(N)
7平面四杆机构有无急回特性取决于极位夹角是否大于零。(Y)
8平面四杆机构的传动角在机构运动过程中是时刻变化的,为保证机构的动力性能,应限制其最小值不小于某一许用值。(Y)
9在曲柄摇杆机构中,若以曲柄为原动件时,最小传动角 可能出现在曲柄与机架两个共线位置之一处。(Y )
可能出现在曲柄与机架两个共线位置之一处。(Y )
10在偏置曲柄滑块机构中,若以曲柄为原动件时,最小传动角 可能出现在曲柄与机架(即滑块的导路)相平行的位置。(N)
可能出现在曲柄与机架(即滑块的导路)相平行的位置。(N)
11摆动导杆机构不存在急回特性。(N)
12增大构件的惯性,是机构通过死点位置的唯一办法。(N)
13平面连杆机构中,从动件同连杆两次共线的位置,出现最小传动角(N)
14双摇杆机构不会出现死点位置。(N)
15凡曲柄摇杆机构,极位夹角必不等于0,故它总具有急回特征。(N)
16图示铰链四杆机构ABCD中,可变长度的a杆在某种合适的长度下,它能获得曲柄摇杆机构(N)
17曲柄摇杆机构只能将回转运动转换为往复摆动。(N)
18在铰链四杆机构中,如存在曲柄,则曲柄一定为最短杆。( N )
19在单缸内燃机中若不计运动副的摩擦,则活塞在任何位置均可驱动曲柄。(N)
20当曲柄摇杆机构把往复摆动运动转变成旋转运动时,曲柄与连杆共线的位置,就是曲柄的“死点”位置。(Y)
21杆长不等的双曲柄机构无死点位置。(Y)
22转动导杆机构中不论取曲柄或导杆为原动件,机构均无死点位置(Y)
III.选择题
1连杆机构行程速比系数是指从动杆反、正行程________。
A)瞬时速度的比值;B)最大速度的比值;C)平均速度的比值。
2铰链四杆机构中若最短杆和最长杆长度之和大于其他两杆长度之和时,则机构中_B_。A)一定有曲柄存在;B)一定无曲柄存在;C)是否有曲柄存在还要看机架是哪一个构件
3平行四杆机构工作时,其传动角________。
A)始终保持为;B)始终是;C)是变化值。
4对心曲柄滑块机构以曲柄为原动件时,其最大传动角 为________。
为________。
A) ;B);C)。
;B);C)。
5设计连杆机构时,为了具有良好的传动条件,应使________。
A)传动角大一些,压力角小一些;B)传动角和压力角都小一些;C)传动角和压力角都大一些。
6在曲柄摇杆机构中,当摇杆为主动件,且________处于共线位置时,机构处于死点位置。A)曲柄与机架;B)曲柄与连杆;C)连杆与摇杆。
7在摆动导杆机构中,当曲柄为主动件时,其传动角________变化的。
A)是由小到大;B)是由大到小;C)是不。
8在曲柄摇杆机构中,当曲柄为主动件,且________共线时,其传动角为最小值。A)曲柄与连杆;B)曲柄与机架;C)摇杆与机架。
9下图所示的摆动导杆机构中,机构的传动角是________。
(1)角A;(2)角B;(3)角C;(4);(5)。
10压力角是在不考虑摩擦情况下作用力和力作用点的________方向所夹的锐角。
A)法线;B)速度;C)加速度;D)切线。
11为使机构具有急回运动,要求行程速比系数________。
A)K=1;B)K1;C)K1。
12铰链四杆机构中有两个构件长度相等且最短,其余构件长度不同,若取一个最短构件作机架,则得到________机构。
A)曲柄摇杆;B)双曲柄;C)双摇杆。
13双曲柄机构________死点。A)存在;B)可能存在;C)不存在。
14对于双摇杆机构,如取不同构件为机架,________使其成为曲柄摇杆机构。A)一定;B)有可能;C)不能。
15铰链四杆机构中存在曲柄时,曲柄________是最短构件。
A)一定;B)不一定;C)一定不。
16要将一个曲柄摇杆机构转化成双摇杆机构,可以用机架转换法将________。
A)原机构的曲柄作为机架;B)原机构的连杆作为机架;
C)原机构的摇杆作为机架。
17已知一铰链四杆机构ABCD,mm,mm,mm,mm,且AD为机架,BC为AD之对边,那么,此机构为________。
题目解答
答案
偏置 _ 双摇杆 低副 没有 具有 曲柄垂直于滑块导路的 曲柄摇杆机构 偏置曲柄滑块机构 摆动导杆机构 其它两杆长之和 其它两杆长之和或满足曲柄存在条件时,以最短杆的对面构件为机架 AD BC AB 或 DC - - 死点[3][3]位置 - 无法装配 死点 曲柄与机架重叠和拉直时两者传动角小者的位置 从动件受力点的速度方向与该点受力方向 移动导杆 机构各杆长度未变,运动链依旧 9 5 改变杆长和形状 扩大回转[4][4]副轴颈尺寸 转换机架 a b-e 摇杆长度和形状 曲柄与连杆转动副轴径尺寸 曲柄为机架 其中任一杆 连架杆上非固定的转动副中心在对应两位置 C C C A B C B 5 B B C C B B C C