题目
30、45、60、90时各斜截面上的正应力和切应力5-6变截面杆所受外力如所示。两段截面直径分别为 d仁40mm、d2=20mm,已知此杆的 max=40MPa。试求拉力F。6-a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。7长为I、内径d=500mm、壁厚S =5mm的薄壁圆筒,受压强 p=2MPa的均匀内压力作用。试求圆筒过直径的纵向截面上 的拉应力。a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。⏺5-3示杆,全杆自重 w=20kN,材料的弹性模量 E=50GPa,已知杆的横截面面积 A=1cm,杆长l=2m,力F=20kN,计算 在自重和载荷作用下杆的变形。5-4示结构中,1、2两杆的直径分别为10mm和20mm,若AB、BC两横杆皆为刚杆,试求1、2杆内的应力。5-5三角架如所示。斜杆 AB由两根80 80 7等边角钢组成,杆长l=2m,横杆AC由两根10号槽钢组成,材料均为a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。2-7已知应力状态如习题 2-6所示,试作应力圆来确定:(1)主应力及主方向;(2)主切应力及主切平面;(3)最大切应力。2-8已知构件内某点处的应力状态为两种应力状态的叠加结果,试求叠加后所得应力状态的主应力、主切应力2-9示双向拉应力状态, x y 。试证明任一斜截面上的正应力均等于 ,而切应力为零。2-10已知K点处为二向应力状态,过 K点两个截面上的应力如所示(应力单位别用法与法确定该点的主应力。2-11 一点处的应力状态在两种坐标系中的表示方法分别如 a)和b)所示。试确定未习观阳]I閑A. 3IS5-13IW B. Q235钢,弹性模量 E=200GPa,a =30o,力F=130kN。求节点 A的位移。 C. =420kN,设载荷全由摩擦力承担,且沿木桩单位长度的摩擦力 f按抛物线f=Ky2 D. K是常数。木桩的横截面面积 A=640cm2,弹性模量E=10Gpa,试确定常数K,并求木桩的缩短量。 E. ,两端固定。求杆的最大拉应力应力和最大压应力。 F. ⏺ G. ⏺ =300mm2。载荷F=50kN,求1、2杆横截面的应力 长度I、弹性模量E均相同 a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。 试求各杆横截面的应力。 Pa曰=100GPa E3=200GPa横截面 i= A2= A3=100mm1。载荷F=20kN。试求各杆横截面的应力。 I、E,在节点A处受铅垂方向载荷 F作用。试求 的铅垂位移。 升至30oC时在玻璃纤维中产生的拉应力。已知升温时玻璃纤维 及50A,线膨胀系数分别为 8XlLi/oC及20X l^l/oC, Pa及4Ga。 ⏺ ⏺ 1=200GPa,2 =X 1(61/oC; E2=100 GPa, 2 =16X 1-1/oC。 Pa未加载荷时, =720kN时各支柱内的应力。 OAB可视为不计自重的刚体。 AC与BD两杆材料、尺寸均相同,A为横截面面积,E为弹性模量, 为 及I均已知。试求当温度均匀升高 T C时,杆AC和BD内的温度应力。⏺ I、横截面面积为 A的匀质等截面杆,两端分别受F1和F2作用(FivF2)。试确定杆的正应力沿长度的变化关系 (不计 摩擦)。 的薄壁圆环,以匀角速度3绕通过圆心且垂直于圆环平面的轴转动。若圆环材料的单位体积质量为p, 弹性模量为 ,试求圆环的动应力及平均直径 D的改变量。 W的钢球装在长为I的转臂的端部,以等角速度3在光滑水平面上绕 0旋转。若转臂的抗拉刚度为 EA,试求转臂 a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。的总伸长(不计转臂的质量)。 ⏺ ⏺ 5-a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。1作示各杆的扭矩。 a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。 m,最大切应力为45MPa,试求轴传递的功率。 a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。 ⏺ ⏺ 习题6-2 6-3画出各杆横截面上的切应力分布 I T T a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。 习题 T= • m,求横截面上的最大切应力。 mm,转速为120rpm,若该轴横截面上的最大切应力等于 60MPa,问所传递的功率是多少 kW 处由电动机带动,输入功率 P1=150kW,在 , 处分别负载P2=75kW, P3=75kW,已知轴的转速为 300rpm。⏺ 作扭矩; a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。求该空心轴及实心轴的最大切应力 6-10 一直径为 =d/4处的切应力和切应变;2.最大切应力和和单位长度扭转角。 a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。6-11材料相同的一根空心圆轴和一根实心圆轴 .它们的横截面面积相同,扭矩相同, 单位长度扭转角。 W,.切变模量G=8X 104MPa。试求此轴的最大切应力和 单位长度扭转角。 =100mm,内径d=50mm ,已知间距为L=的两横截面的相对扭转角 ①=°,材料的切变模量 G = Pa,求:1.轴内最大切应力;2.当轴以n=80rpm的速度旋转时,轴传递的功率。 L,两端面直径分别为d1,d2的圆锥形杆,其两端各受一矩为 M的集中力偶作用,试求杆的总扭转角。 W,切变模量80GPa设计其直径,使切应力不超过 50MPa,并且在长度内扭转 角不超过3°。 M=3kN・m的一对外力偶作用,材料的切变模量 G=80GPst求:1.杆内最大切应力的大小,位置和方 向;2.横截面短边中点的切应力;3.单位长度扭转角。 T形薄壁截面杆,长 L=2m,在两端受扭转 T=・m,材料的切变模量 =8X 102MPa求此杆在自由扭转时的最大切应力及扭转 角 MPa.求:1.确定其扭转力偶矩;2.若在杆上沿母线切 开一条缝,试问开口后扭转力偶矩是多少 a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。 2-12示受力板件,试证明尖角 “l.'.llr 处各截面的正应力与切应力均为零。 L3H a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。 ⏺ ⏺ MPa),试求其主应力及第一、第二、第三不变量 丨2、丨3。 MPa),试画三向应力圆,并求主应力、最大正应力与最大切应力。 x+ y+ z, w= Xx + yy+ zxy+ Ixy+Jyz+Kzx= A、B、C、D、E、F、G、I、J K均为常数, 4-a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。a) F- 1-|||-F-|||-1 12-|||-11 1^2 2F 2F F-|||-F-[ B-|||-A-|||-1 dfrac (1)(3)-|||-c)-|||-习题 -10 图-|||-jjiss g图-|||-.5-11 长为I的变截面杆,如图所示。左右两端的直径分别为d1试求 、d2,杆只在两端作用着轴向拉力 F,材料的弹性模量为 E,-|||-杆的总伸长。求该点处的应变分量。 ⏺ d。 X、y方向的线应变;2)以X与y为两垂直线元的切应变;3)该平面 应变及其与X轴的夹角。 3-5 用法习题3-3。 3-6 用法习题3-4。 x 10xy m/m , =2X 10 m/m , =1 x 10 rad;分别用法和法求该点 xy面内的:1)与X 轴夹角为45°方向的线应变和以45°方向为始边的直角的切应变; 2)最大线应变的方向和线应变的值。 3-8设在平面内一点周围任何方向上的线应变都相同,证明以此点为顶点的任意直角的切应变均为零。 3-9试导出在xy平面上的正方形微元面,在纯剪状态下切应变 与对角线方向的 的关系 3-10用电阻应变片测得某点在某平面内 0°, 45°和90°方向的线应变分别为-130
30、45、60、90时各斜截面上的正应力和切应力
5-6变截面杆所受外力如所示。两段截面直径分别为 d仁40mm、d2=20mm,已知此杆的 max=40MPa。试求拉力F。
6-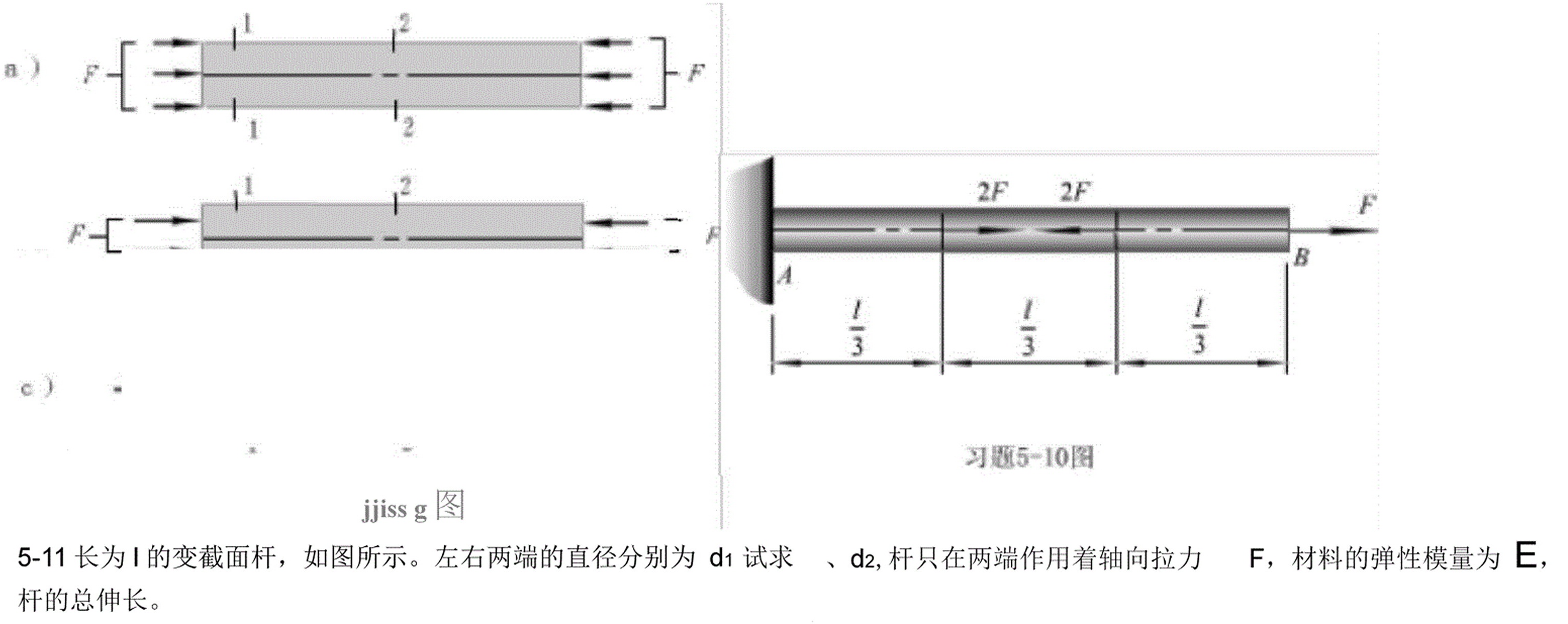
 7长为I、内径d=500mm、壁厚S =5mm的薄壁圆筒,受压强 p=2MPa的均匀内压力作用。试求圆筒过直径的纵向截面上 的拉应力。
7长为I、内径d=500mm、壁厚S =5mm的薄壁圆筒,受压强 p=2MPa的均匀内压力作用。试求圆筒过直径的纵向截面上 的拉应力。
 ⏺
⏺
5-3示杆,全杆自重 w=20kN,材料的弹性模量 E=50GPa,已知杆的横截面面积 A=1cm,杆长l=2m,力F=20kN,计算 在自重和载荷作用下杆的变形。
5-4示结构中,1、2两杆的直径分别为10mm和20mm,若AB、BC两横杆皆为刚杆,试求1、2杆内的应力。
5-5三角架如所示。斜杆 AB由两根80 80 7等边角钢组成,杆长l=2m,横杆AC由两根10号槽钢组成,材料均为
2-7已知应力状态如习题 2-6所示,试作应力圆来确定:(1)主应力及主方向;
(2)主切应力及主切平面;(3)最大切应力。
2-8已知构件内某点处的应力状态为两种应力状态的叠加结果,试求叠加后所得
应力状态的主应力、主切应力
2-9示双向拉应力状态, x y 。试证明任一斜截面上的正应力均等
于 ,而切应力为零。
2-10已知K点处为二向应力状态,过 K点两个截面上的应力如所示(应力单位
别用法与法确定该点的主应力。
2-11 一点处的应力状态在两种坐标系中的表示方法分别如 a)和b)所示。试确定未
习观阳]I閑
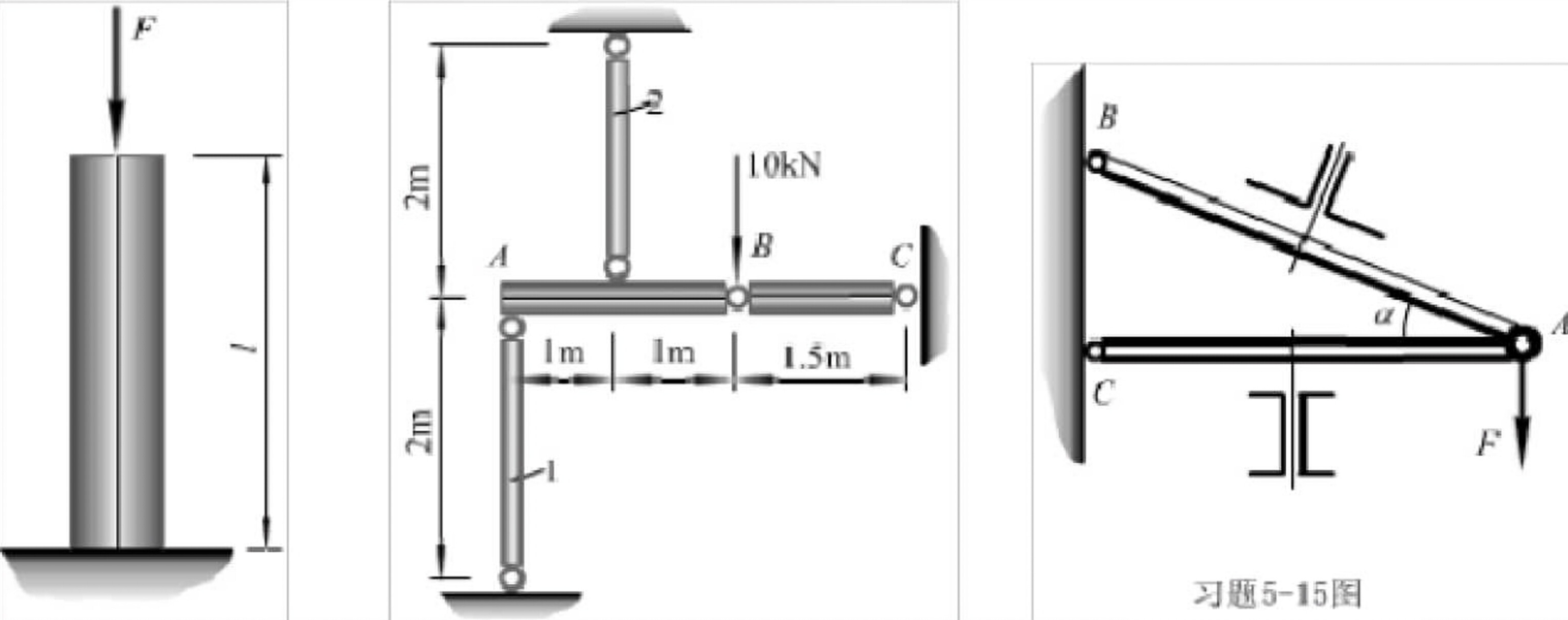
A. 3IS5-13IWB. Q235钢,弹性模量 E=200GPa,a =30o,力F=130kN。求节点 A的位移。
C. =420kN,设载荷全由摩擦力承担,且沿木桩单位长度的摩擦力 f按抛物线f=Ky2
D. K是常数。木桩的横截面面积 A=640cm2,弹性模量E=10Gpa,试确定常数K,并求木桩的缩短量。
E. ,两端固定。求杆的最大拉应力应力和最大压应力。
F. ⏺
G. ⏺
=300mm2。载荷F=50kN,求1、2杆横截面的应力
长度I、弹性模量E均相同
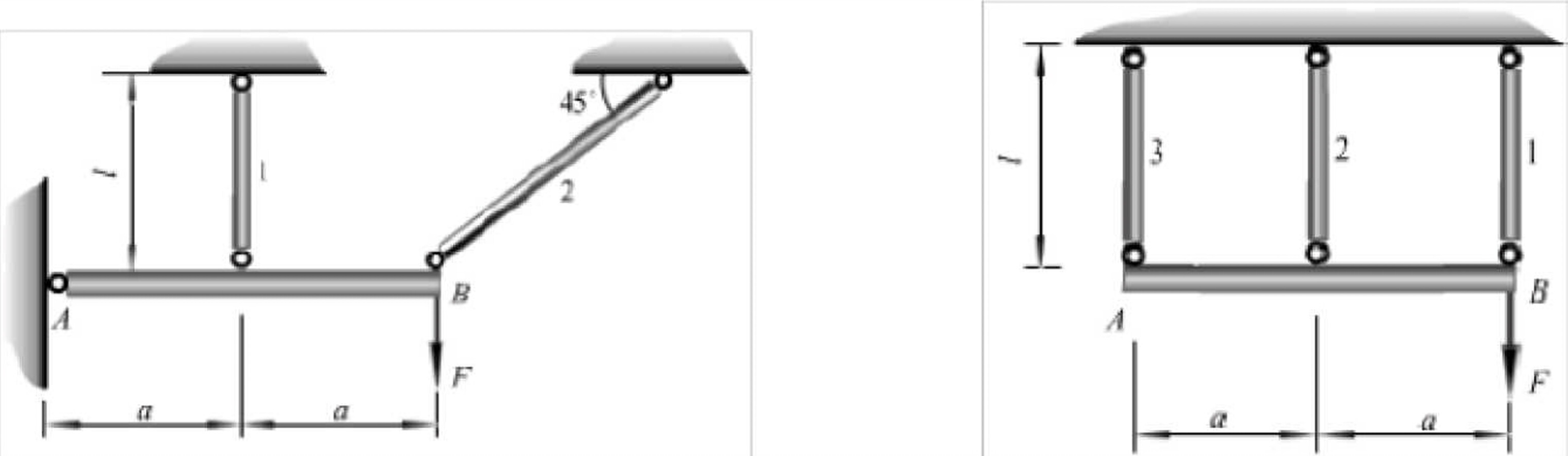
试求各杆横截面的应力。
Pa曰=100GPa E3=200GPa横截面
i= A2= A3=100mm1。载荷F=20kN。试求各杆横截面的应力。
I、E,在节点A处受铅垂方向载荷 F作用。试求
的铅垂位移。
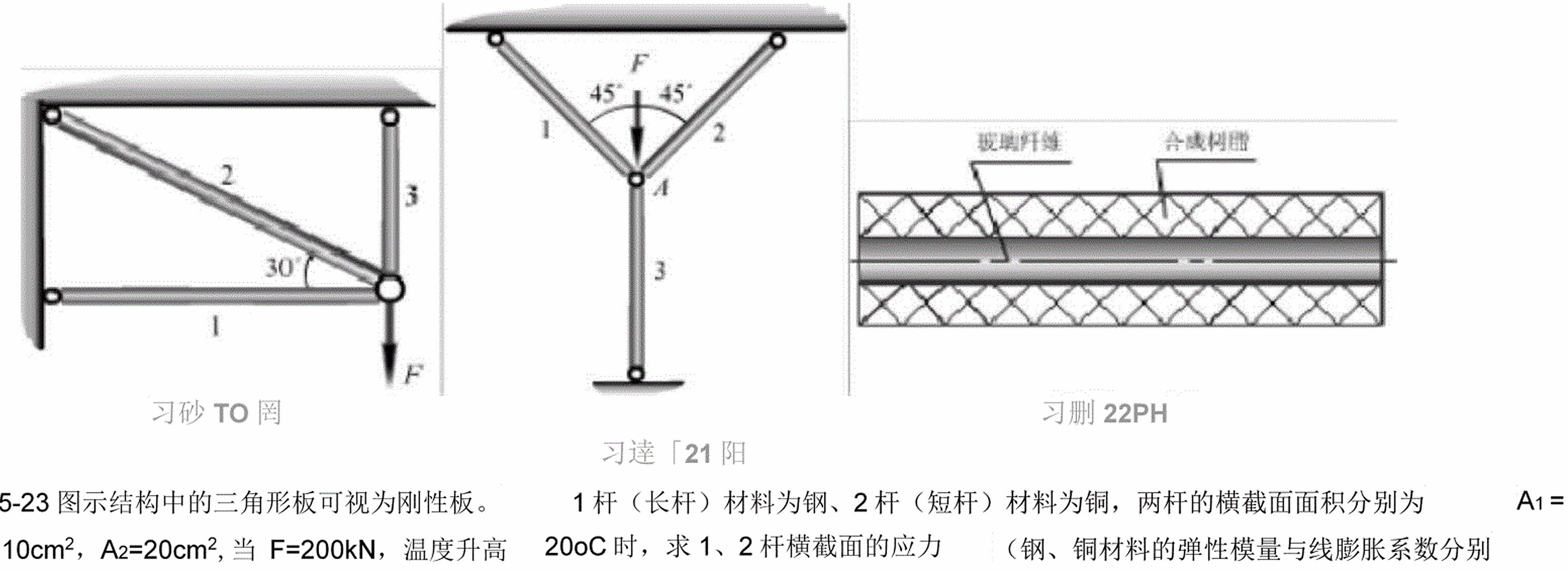
升至30oC时在玻璃纤维中产生的拉应力。已知升温时玻璃纤维
及50A,线膨胀系数分别为 8XlLi/oC及20X l^l/oC,
Pa及4Ga。
⏺
⏺
1=200GPa,2 =X 1(61/oC; E2=100 GPa, 2 =16X 1-1/oC。
Pa未加载荷时,
=720kN时各支柱内的应力。
OAB可视为不计自重的刚体。 AC与BD两杆材料、尺寸均相同,A为横截面面积,E为弹性模量, 为
及I均已知。试求当温度均匀升高 T C时,杆AC和BD内的温度应力。⏺
I、横截面面积为 A的匀质等截面杆,两端分别受F1和F2作用(FivF2)。试确定杆的正应力沿长度的变化关系 (不计
摩擦)。
的薄壁圆环,以匀角速度3绕通过圆心且垂直于圆环平面的轴转动。若圆环材料的单位体积质量为p, 弹性模量为
,试求圆环的动应力及平均直径 D的改变量。
W的钢球装在长为I的转臂的端部,以等角速度3在光滑水平面上绕 0旋转。若转臂的抗拉刚度为 EA,试求转臂
 的总伸长(不计转臂的质量)。
的总伸长(不计转臂的质量)。⏺
⏺
5-
 1作示各杆的扭矩。
1作示各杆的扭矩。
m,最大切应力为45MPa,试求轴传递的功率。
⏺
⏺
习题6-2
6-3画出各杆横截面上的切应力分布
I T T
习题
T= • m,求横截面上的最大切应力。
mm,转速为120rpm,若该轴横截面上的最大切应力等于 60MPa,问所传递的功率是多少 kW
处由电动机带动,输入功率 P1=150kW,在
,
处分别负载P2=75kW, P3=75kW,已知轴的转速为 300rpm。⏺
作扭矩;
 求该空心轴及实心轴的最大切应力
求该空心轴及实心轴的最大切应力6-10 一直径为
=d/4处的切应力和切应变;2.最大切应力和和单位长度扭转角。
 6-11材料相同的一根空心圆轴和一根实心圆轴 .它们的横截面面积相同,扭矩相同,
6-11材料相同的一根空心圆轴和一根实心圆轴 .它们的横截面面积相同,扭矩相同,单位长度扭转角。
W,.切变模量G=8X 104MPa。试求此轴的最大切应力和 单位长度扭转角。
=100mm,内径d=50mm ,已知间距为L=的两横截面的相对扭转角 ①=°,材料的切变模量 G =
Pa,求:1.轴内最大切应力;2.当轴以n=80rpm的速度旋转时,轴传递的功率。
L,两端面直径分别为d1,d2的圆锥形杆,其两端各受一矩为 M的集中力偶作用,试求杆的总扭转角。
W,切变模量80GPa设计其直径,使切应力不超过 50MPa,并且在长度内扭转
角不超过3°。
M=3kN・m的一对外力偶作用,材料的切变模量 G=80GPst求:1.杆内最大切应力的大小,位置和方
向;2.横截面短边中点的切应力;3.单位长度扭转角。
T形薄壁截面杆,长 L=2m,在两端受扭转
T=・m,材料的切变模量
=8X 102MPa求此杆在自由扭转时的最大切应力及扭转
角
MPa.求:1.确定其扭转力偶矩;2.若在杆上沿母线切
开一条缝,试问开口后扭转力偶矩是多少

2-12示受力板件,试证明尖角
“l.'.llr
处各截面的正应力与切应力均为零。
L3H
⏺
⏺
MPa),试求其主应力及第一、第二、第三不变量 丨2、丨3。
MPa),试画三向应力圆,并求主应力、最大正应力与最大切应力。
x+
y+
z, w=
Xx +
yy+
zxy+ Ixy+Jyz+Kzx= A、B、C、D、E、F、G、I、J K均为常数,
4-
 求该点处的应变分量。
求该点处的应变分量。⏺
d。
X、y方向的线应变;2)以X与y为两垂直线元的切应变;3)该平面 应变及其与X轴的夹角。
3-5 用法习题3-3。
3-6 用法习题3-4。
x 10xy m/m , =2X 10 m/m , =1 x 10 rad;分别用法和法求该点 xy面内的:1)与X
轴夹角为45°方向的线应变和以45°方向为始边的直角的切应变; 2)最大线应变的方向和线应变的值。
3-8设在平面内一点周围任何方向上的线应变都相同,证明以此点为顶点的任意直角的切应变均为零。
3-9试导出在xy平面上的正方形微元面,在纯剪状态下切应变 与对角线方向的
的关系
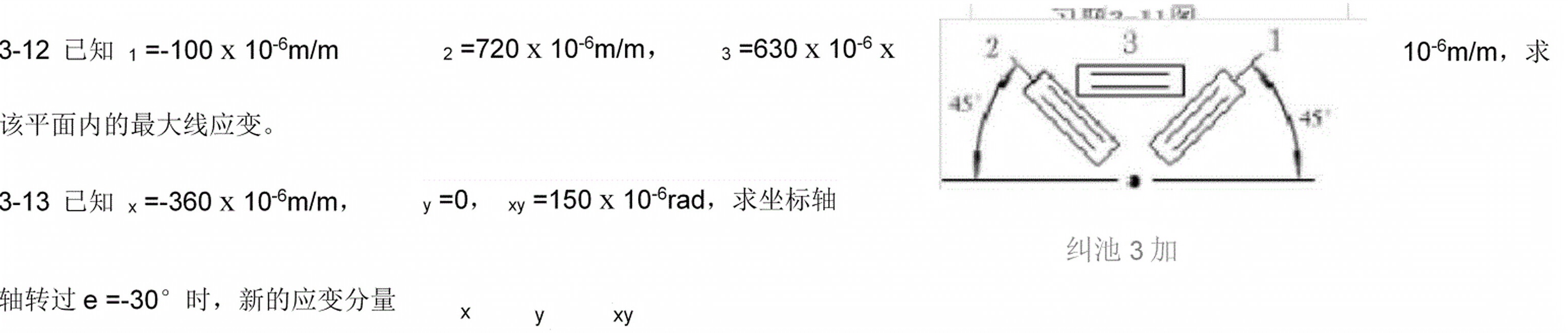
3-10用电阻应变片测得某点在某平面内 0°, 45°和90°方向的线应变分别为-130
题目解答
答案
A3IS5-13IW 习题 6- 2 I T “l.'.llr 习趣 L3H