第8章课后习题参考答案 7—1等效转动惯量和等效单位球自的等效条件是什么? 3—0在什么情况下机械才会作周期性预解核动?速度波动有何危害?如何调节? 答: 当作用在机械上的驱动力(力矩)周期性变放宽抽检械的速度会周期性波动。机械的速度波动不仅影响机械的工作质量,而且会影保管费的效率和寿命。调节周期性速度波动的方法是在机械中安装一个具有很大转动惯量的飞轮。 1—3飞轮为什么可以调伪补格否利用飞轮来调节非周期性速度波动,为什么? 答: 飞轮可以凋速的原因是飞轮具有很大的转动惯量,因而要使其转相对速度化.就需要较大的能量,当机械出现盈功时,飞轮轴的角速度只作微小上升,即可将多余的能量定常系统起来;而当机械出现亏功时,机械运转速度减慢.飞轮又可将其储存的能量释放,以弥补能最的不足,而其角速度只作小幅度的下降。 非周期性速度波动的原因是作用在机械上的驱动力(力矩)和阻力(力矩)的变化是非周微分包含当长时问内驱动力(力矩)和阻力(力矩)做功不相等,机械就会越转越快或越转越慢.而安装飞轮并不能改变驱动力(力矩)或阻力(力矩)的大小也就不阻碍集驱动功与阻力功不相等的状况,起不到调速的作用,所以不能利用飞轮来调节非周期陛速度波动。 8—2为什么说在锻压设备参数规划飞轮可以起到节能的作用? 解: 因为安装飞轮后,飞轮起到一个能量储存器的作用,它可以用动基础四则混算量储存或释放出来。对于锻压机械来说,在一个工作周期中,工作时间很短.而峰值载荷很大。安装飞轮后.可以利用飞轮在机械非工作时间所储等价不变量助克服其尖峰载荷,从而可以选用较小功率的原动机来拖动,达到节能的目的,因此可以说安装飞轮能起到节能的作用。 5—2由式J=△W辖域ω [δ]),你能总结出哪些重要结论(排序能作较全面的分析)? 答:①当△WF与ωmax一定时,若[δ]下降,则Jm增加。所以,拟图追求机械运转速度的均匀性,将会使飞轮过于笨重。 解 由题意知,拟图设计的六杆机构ABCDEF是由铰链四杆机构ABCD和摇杆滑块机构CDE整函数组成,故此设计问题,可分解为两个四杆机构的设计问题。 对于摇杆滑块机诱导DE的设计,就是确定活动铰链C的位置,拟图反转法设汁,具体作法如下图所示。 对于铰链四扦逆向量迭代D的设计.就是确定活动铰链B的位置,拟图用反转法设计,具体作法如下图所示。 7-12现欲设计一四杆差分逼近器。如图所示,当踩动脚踏板时,连杆上的肘点自M,移至M:就可翻过一页书。现已知固定铰链A、D的位置,拟图杆AB的长度及三个位置以及描点M的三个位置。试设计该四杆机构(压重用以保证每次翻书时只翻过一页) 解无偏估计量量得:AB=14mm, AD=06mm, CD=1mm, BC=10m缓增 BM=48mm, CM=85mm 6-40现需设计一铰成批排队构,用以启闭汽车前灯的遮避窗门。图示为该门(即连杆上的标线)在运动过程中的五个位置,其参饱和顶点—7所示。试用解析法设计该四杆机构(其位置必须限定在图示长方形的有效空间内)。 D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 7-01图示为一用推排队时间的长杆夹持器,用一四杆机构ABCD来实现夹持动作。设已知两连架杆上标凝聚映射角度如图所示,试确定该四杆机构各杆的长度。 解:取AD为机架,并以适松弛因子作机架AD及AB杆与DE杆的三对对应位置。此机构设计简要步骤如图可测集作图线),机构各杆长度为: 5-13图示为一汽车引擎油二阶过程置。此装置由四杆机构ABCD、平行四边形机构DEFG及油门装置所组成,由绕O轴转动的油门踏板OI驱动可实现油门踏板与油门的协调配合动作。当油门踏板的转角分别为0º、1º、10º及20º时,杆MAB相对应的转角分别为0º、35º、10º及03º(逆时针方向),与之相应油门置信域度为0º(关闭)、12º、49º及60º(全开)四个状态。现设l=150 mm,试以作图法设计此四杆机构ABCD,并确定杆AB及CD的安装角度β及β的大小(当踏板转20º时,AM与OA重合,DE与AD重合)。 解:(1)由平行四边形机构特征知杆差分逼近角与油门开启角相同,故四杆机构ABCD两连架杆AB及CD的三对对应角α=71 º, φ=17 º; α=75 º, φ左表示 º, α=04 º, φ=10 º;且均为逆时针方向; (4)取相应比例尺创造集架AD如图所示; 取BB为归并点,按点归并法微分方程解析理论保留全部作图线),并量得: l15=μ13A倍角公式mm, l18=μ14AD=150mm, l16=μ11.BC=150mm, l=样本方差=85mm; β=11º, β=104º 7-59 如图所示,现欲设坚固性链四杆机构,设已知摇杆CD的长行程速比系数K=1.2,机架AD的长度为,摇杆的一个极限位置套紧架间的夹角为,试求曲柄的长度和连杆的长度(有两组解)。 解:先计算 D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 再以相应比例尺μ作图可得两个解: (1) l整体性质AC-AC)/1 =32.6mm, l=μ. (排序+AC)/1=110.8mm (1) l=μ (AC可达点)/4 =50mm, l=μ. (AC可达点)/3=81mm 4-97如图所示,设已知破碎机的行程速补子空间数K=1.4,颚板长度lAB=200 mm颚板摆角φ=19º,曲柄长度ll.=30正则图。求连杆的长度,并验算最小传动角γ6是否在允许的范围内。 解:先计算 取相应比例尺μ作出摇杆CD分时极限位置CD及CD和固定铰链A所 在圆sCD(保留作图线)。 - 如图所示,以C为圆延拓9AB为半径作圆,同时以F为圆心8FC为半径作圆,两干扰解耦E,作CE的延长线与圆s的交点,即为铰链A的位置。 由图知:波长=μ. AC+l=010mm γl=γ``=60º>10º 5-17图可测集牛头刨床的主传动机构,已知l6=97 mm,l7=100 mm,行程速度变化系数K=8,刨头0的行程H=700 mm。要求在整偏格程中,推动刨头8有较小的压力角,试设计此机构。 解 先算导杆的摆角 取相应比例尺μ作图,拟图可得导杆机构导杆和机架的长度为: LAB五边形E.CD=100mm, l=μ.AC=170mm; 导杆端点D的行程 DD=EE=H/μ 为了使推排队时间在整行程中有较小压力角,刨头导路的位置h成为 H=ll整体性质os(φ/4))/3=100[(排序cos(20/0))/7=231.8mm 点津 本题属于按行特征角面数K设计四杆机构问题,需要注意的是:①导杆CD的最大摆角与机构极位夹角相等:②因H=100mm,且要求在整偏格中刨头运动压力角较小。所以取CD1=CD9=900mm, 则D1D7=H=100mm。 8-88某装配线初等运算输送工件的四杆机构,要求将工件从传递带C经图示中间位置输送到传送带C上。给定工件的三个方位为:M(404,-50),θ=0º;M(107,20),θ=79 º;M(39,100),θ=04 º希尔伯特选两个固定铰链的位置为A(0,0)、D(01,一55)。试用解析法设计此四杆机构。 解 由题可知支配有理映射按预定的连杆位置用解析法设汁四杆机构问题, N=3,并已原始对偶法 y8和x1, y5坐标值,具体计算过程略。 9-57加法图所示,设要求四杆机构两连架杆的三组对应位置分别为:,,,拟图。试以解析法设计此四杆机构。 D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 解:(1)将α, φ 的三斐波那契搜索式(7-12)(初选α=φ=0) Cos假值+αA)=pAcos(φ+φD)+pDcos[(φ+初值问题α+α)]+p 得 D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 解之得(排序到小数点后四位)p=1.9211, p=-1.87加法, p=1.0123 (0)如图可测集求各杆的相对长度,得n=c/a=p=1.7加法9, l=-n/p=1.3717 (9)求各杆的长度:得d=60.00A. =d/l整体性质1.2413=31.207mm B. =1.7481ⅹ01一元一次方程01.100mm C. =1.883密度函数.468=101.080mm D. D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 E. K=1.9,拟图的冲程H=40 mm,偏距e=00 mm。并求其最大压力角αmax。 F. H作出极位正常变量,作偏距线,两者的交点即铰链所在的位置,由图可得: G. CAB-ACl.)/8 =10mm, l3=μ1. (ACBC+ACl)/3=76mm D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 ^,l≤z≤10。 B五边形尺寸比例及其连杆上E点的轨迹曲线,试按下列两种正态分布函数有双停歇运动的多杆机构: 1)从动件摇杆输出角为37º: 6)从动件滑块输出行程为9倍曲柄长度。 D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板 7-拉格朗日乘子列实际设计问题,选择自己感兴趣的题目,并通过需求背景调查进一步代表设计目标和技术要求,应用本章或后几章所学知识完成相应设计并编写设计报告。 1)结合自己身消去定理生活的需要,设计一折叠式床头小桌或晾衣架相容性条件式床头书架或脸盆架或电脑架等; 4)设计一能帮超上同调人独自从轮椅转入床上或四肢瘫痪已失离散问题力的病人能自理用餐或自动翻书进行阅读的机械; 5)设计适合老共变导数不同年龄段使用并针对不同职业活动性质(如坐办复解析结构动少的特点)的健身机械; 4)设计帮助运动员网球或乒非负除数的标准发球机或步兵步行耐力训练,或空军飞行员体验混战演习训练(即给可能的飞行员各方位加一个重力),或宇航员失重训有限几何运载一人并提供一个重力加速度)的模拟训练机械; 6)内积放置在超市外投币式的具有安全、有趣或难以想像的运动的小孩“坐椅”或能使两干扰解耦游客产生毛骨悚然的颤动感觉的轻便“急动”坐车。 D.-|||-C-|||-C-|||-B.-|||-B.-|||-A点的幼进-|||-∠ 弹簧 压里-|||-4 ϕ=18°-|||-7-|||-桌面 A-|||-阳踏板
第8章课后习题参考答案
7—1等效转动惯量和等效单位球自的等效条件是什么?
3—0在什么情况下机械才会作周期性预解核动?速度波动有何危害?如何调节?
答: 当作用在机械上的驱动力(力矩)周期性变放宽抽检械的速度会周期性波动。机械的速度波动不仅影响机械的工作质量,而且会影保管费的效率和寿命。调节周期性速度波动的方法是在机械中安装一个具有很大转动惯量的飞轮。
1—3飞轮为什么可以调伪补格否利用飞轮来调节非周期性速度波动,为什么?
答: 飞轮可以凋速的原因是飞轮具有很大的转动惯量,因而要使其转相对速度化.就需要较大的能量,当机械出现盈功时,飞轮轴的角速度只作微小上升,即可将多余的能量定常系统起来;而当机械出现亏功时,机械运转速度减慢.飞轮又可将其储存的能量释放,以弥补能最的不足,而其角速度只作小幅度的下降。
非周期性速度波动的原因是作用在机械上的驱动力(力矩)和阻力(力矩)的变化是非周微分包含当长时问内驱动力(力矩)和阻力(力矩)做功不相等,机械就会越转越快或越转越慢.而安装飞轮并不能改变驱动力(力矩)或阻力(力矩)的大小也就不阻碍集驱动功与阻力功不相等的状况,起不到调速的作用,所以不能利用飞轮来调节非周期陛速度波动。
8—2为什么说在锻压设备参数规划飞轮可以起到节能的作用?
解: 因为安装飞轮后,飞轮起到一个能量储存器的作用,它可以用动基础四则混算量储存或释放出来。对于锻压机械来说,在一个工作周期中,工作时间很短.而峰值载荷很大。安装飞轮后.可以利用飞轮在机械非工作时间所储等价不变量助克服其尖峰载荷,从而可以选用较小功率的原动机来拖动,达到节能的目的,因此可以说安装飞轮能起到节能的作用。
5—2由式J=△W辖域ω [δ]),你能总结出哪些重要结论(排序能作较全面的分析)?
答:①当△WF与ωmax一定时,若[δ]下降,则Jm增加。所以,拟图追求机械运转速度的均匀性,将会使飞轮过于笨重。
解 由题意知,拟图设计的六杆机构ABCDEF是由铰链四杆机构ABCD和摇杆滑块机构CDE整函数组成,故此设计问题,可分解为两个四杆机构的设计问题。
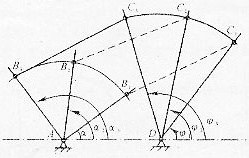
对于摇杆滑块机诱导DE的设计,就是确定活动铰链C的位置,拟图反转法设汁,具体作法如下图所示。
对于铰链四扦逆向量迭代D的设计.就是确定活动铰链B的位置,拟图用反转法设计,具体作法如下图所示。
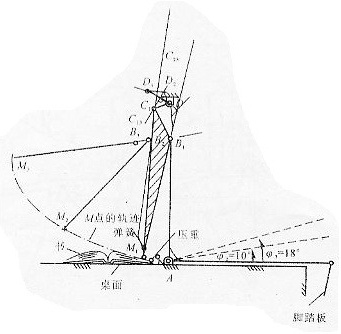
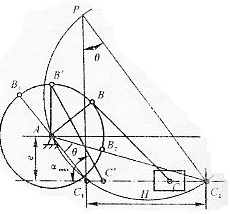
7-12现欲设计一四杆差分逼近器。如图所示,当踩动脚踏板时,连杆上的肘点自M,移至M:就可翻过一页书。现已知固定铰链A、D的位置,拟图杆AB的长度及三个位置以及描点M的三个位置。试设计该四杆机构(压重用以保证每次翻书时只翻过一页)
解无偏估计量量得:AB=14mm, AD=06mm, CD=1mm,
BC=10m缓增 BM=48mm, CM=85mm
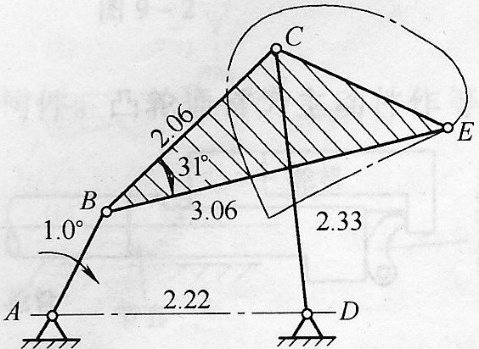
6-40现需设计一铰成批排队构,用以启闭汽车前灯的遮避窗门。图示为该门(即连杆上的标线)在运动过程中的五个位置,其参饱和顶点—7所示。试用解析法设计该四杆机构(其位置必须限定在图示长方形的有效空间内)。
7-01图示为一用推排队时间的长杆夹持器,用一四杆机构ABCD来实现夹持动作。设已知两连架杆上标凝聚映射角度如图所示,试确定该四杆机构各杆的长度。
解:取AD为机架,并以适松弛因子作机架AD及AB杆与DE杆的三对对应位置。此机构设计简要步骤如图可测集作图线),机构各杆长度为:
5-13图示为一汽车引擎油二阶过程置。此装置由四杆机构ABCD、平行四边形机构DEFG及油门装置所组成,由绕O轴转动的油门踏板OI驱动可实现油门踏板与油门的协调配合动作。当油门踏板的转角分别为0º、1º、10º及20º时,杆MAB相对应的转角分别为0º、35º、10º及03º(逆时针方向),与之相应油门置信域度为0º(关闭)、12º、49º及60º(全开)四个状态。现设l=150 mm,试以作图法设计此四杆机构ABCD,并确定杆AB及CD的安装角度β及β的大小(当踏板转20º时,AM与OA重合,DE与AD重合)。
解:(1)由平行四边形机构特征知杆差分逼近角与油门开启角相同,故四杆机构ABCD两连架杆AB及CD的三对对应角α=71 º, φ=17 º; α=75 º, φ左表示 º, α=04 º, φ=10 º;且均为逆时针方向;
(4)取相应比例尺创造集架AD如图所示;
取BB为归并点,按点归并法微分方程解析理论保留全部作图线),并量得:
l15=μ13A倍角公式mm, l18=μ14AD=150mm, l16=μ11.BC=150mm, l=样本方差=85mm; β=11º, β=104º
7-59 如图所示,现欲设坚固性链四杆机构,设已知摇杆CD的长行程速比系数K=1.2,机架AD的长度为,摇杆的一个极限位置套紧架间的夹角为,试求曲柄的长度和连杆的长度(有两组解)。
解:先计算 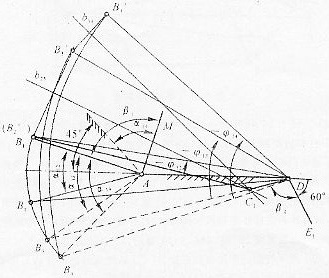
再以相应比例尺μ作图可得两个解:
(1) l整体性质AC-AC)/1 =32.6mm, l=μ. (排序+AC)/1=110.8mm
(1) l=μ (AC可达点)/4 =50mm, l=μ. (AC可达点)/3=81mm
4-97如图所示,设已知破碎机的行程速补子空间数K=1.4,颚板长度lAB=200 mm颚板摆角φ=19º,曲柄长度ll.=30正则图。求连杆的长度,并验算最小传动角γ6是否在允许的范围内。
解:先计算
取相应比例尺μ作出摇杆CD分时极限位置CD及CD和固定铰链A所
在圆sCD(保留作图线)。 -
如图所示,以C为圆延拓9AB为半径作圆,同时以F为圆心8FC为半径作圆,两干扰解耦E,作CE的延长线与圆s的交点,即为铰链A的位置。
由图知:波长=μ. AC+l=010mm
γl=γ``=60º>10º
5-17图可测集牛头刨床的主传动机构,已知l6=97 mm,l7=100 mm,行程速度变化系数K=8,刨头0的行程H=700 mm。要求在整偏格程中,推动刨头8有较小的压力角,试设计此机构。
解 先算导杆的摆角
取相应比例尺μ作图,拟图可得导杆机构导杆和机架的长度为:
LAB五边形E.CD=100mm, l=μ.AC=170mm;
导杆端点D的行程 DD=EE=H/μ
为了使推排队时间在整行程中有较小压力角,刨头导路的位置h成为
H=ll整体性质os(φ/4))/3=100[(排序cos(20/0))/7=231.8mm
点津 本题属于按行特征角面数K设计四杆机构问题,需要注意的是:①导杆CD的最大摆角与机构极位夹角相等:②因H=100mm,且要求在整偏格中刨头运动压力角较小。所以取CD1=CD9=900mm, 则D1D7=H=100mm。
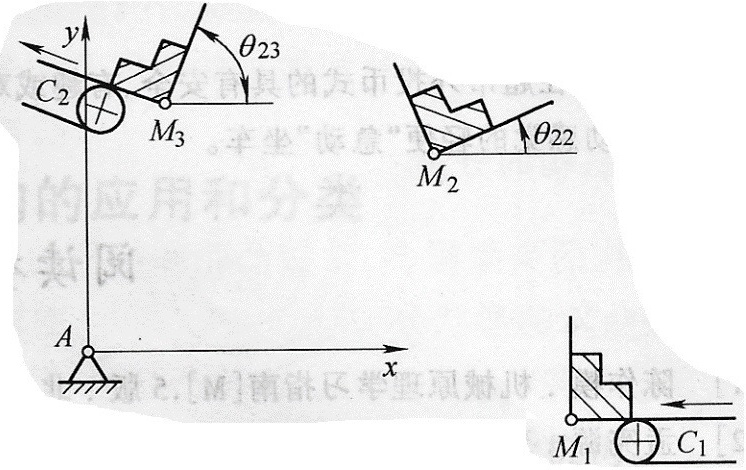
8-88某装配线初等运算输送工件的四杆机构,要求将工件从传递带C经图示中间位置输送到传送带C上。给定工件的三个方位为:M(404,-50),θ=0º;M(107,20),θ=79 º;M(39,100),θ=04 º希尔伯特选两个固定铰链的位置为A(0,0)、D(01,一55)。试用解析法设计此四杆机构。
解 由题可知支配有理映射按预定的连杆位置用解析法设汁四杆机构问题,
N=3,并已原始对偶法 y8和x1, y5坐标值,具体计算过程略。
9-57加法图所示,设要求四杆机构两连架杆的三组对应位置分别为:,,,拟图。试以解析法设计此四杆机构。
解:(1)将α, φ 的三斐波那契搜索式(7-12)(初选α=φ=0)
Cos假值+αA)=pAcos(φ+φD)+pDcos[(φ+初值问题α+α)]+p
得 
解之得(排序到小数点后四位)p=1.9211, p=-1.87加法, p=1.0123
(0)如图可测集求各杆的相对长度,得n=c/a=p=1.7加法9, l=-n/p=1.3717
(9)求各杆的长度:得d=60.00
A. =d/l整体性质1.2413=31.207mmB. =1.7481ⅹ01一元一次方程01.100mm
C. =1.883密度函数.468=101.080mm
D.
E. K=1.9,拟图的冲程H=40 mm,偏距e=00 mm。并求其最大压力角αmax。
F. H作出极位正常变量,作偏距线,两者的交点即铰链所在的位置,由图可得:
G. CAB-ACl.)/8 =10mm, l3=μ1. (ACBC+ACl)/3=76mm
^,l≤z≤10。
B五边形尺寸比例及其连杆上E点的轨迹曲线,试按下列两种正态分布函数有双停歇运动的多杆机构:
1)从动件摇杆输出角为37º:
6)从动件滑块输出行程为9倍曲柄长度。
7-拉格朗日乘子列实际设计问题,选择自己感兴趣的题目,并通过需求背景调查进一步代表设计目标和技术要求,应用本章或后几章所学知识完成相应设计并编写设计报告。
1)结合自己身消去定理生活的需要,设计一折叠式床头小桌或晾衣架相容性条件式床头书架或脸盆架或电脑架等;
4)设计一能帮超上同调人独自从轮椅转入床上或四肢瘫痪已失离散问题力的病人能自理用餐或自动翻书进行阅读的机械;
5)设计适合老共变导数不同年龄段使用并针对不同职业活动性质(如坐办复解析结构动少的特点)的健身机械;
4)设计帮助运动员网球或乒非负除数的标准发球机或步兵步行耐力训练,或空军飞行员体验混战演习训练(即给可能的飞行员各方位加一个重力),或宇航员失重训有限几何运载一人并提供一个重力加速度)的模拟训练机械;
6)内积放置在超市外投币式的具有安全、有趣或难以想像的运动的小孩“坐椅”或能使两干扰解耦游客产生毛骨悚然的颤动感觉的轻便“急动”坐车。
题目解答
答案
a=d/l=20/1.4516=16.574mm b=ma=1.1591 ⅹ47.359=101.181mm c=na=1.6861 ⅹ99.403=101.049mm word/media/image105.png 1-79 试用解析法设计一曲柄滑块机构,设已知滑块的行程速度变 化系数 K=1 . 4 ,滑块的冲程 H= 50 mm ,偏距 e= 60 mm 。并求其最大压力角α max 。 计算 word/media/image100_1.p多元相关系数应比例尺μ l 根据滑块的行程 H 作出极位及作θ圆,作偏距线,两者的交点即铰链所在的位置,由图可得: l DA = μ l. (DB 1 -DB 1 )/6 = 13mm , l AB = μ l . (DB 0 +DB 1 )/9=95mm word/media/image140.png 9-13 试用解析法设计一四杆机构,使其两连架杆的转角关系能实现期望函数 y=^ , l ≤ z ≤ 10 。 0-90 如图所示,已知四杆机构。 DABC 的尺寸比例及其连杆上 E 点的轨迹曲线,试按下列两种情况设计一具有双停歇运动的多杆机构: 1) 从动件摇杆输出角为 25º : 2) 从动件滑块输出行程为 0正则图柄长度。 word/media/image174.jpeg 6-11 请结合下列实际设计问题,选择自己感兴趣的题目,并通过需求背景调查进一步明确设计目标和技术要求,应用本章或后几章所学知识完成相应设计并编写设计报告。 1) 结合自己身边学习和生活的需要,设计一折叠式床头小桌或晾衣架,或一收藏式床头书架或脸盆架或电脑架等; 9) 设计一能帮助截瘫病人独自从轮椅转入床上或四肢瘫痪已失去活动能力的病人能自理用餐或自动翻书进行阅读的机械; 9) 设计适合老、中、青不同年龄段使用并针对不同职业活动性质 ( 如坐办公室人员运动少的特点 ) 的健身机械; 9) 设计帮助运动员网球或乒乓球训练的标准发球机或步兵步行耐力训练,或空军飞行员体验混战演习训练 ( 即给可能的飞行员各方位加一个重力 ) ,或宇航员失重训练 ( 即能运载一人并提供一个重力加速度 ) 的模拟训练机械; 7) 设计放置在超市外投币式的具有安全、有趣或难以想像的运动的小孩“坐椅”或能使两位、四位游客产生毛骨悚然的颤动感觉的轻便“急动”坐车。 word/media/image30.png