题目
二、用位移法计算图示刚架,求出系数项和自由项。(15分)P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777解:(1)基本未知量这个刚架基本未知量只有一个结点B的角位移P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777。(2)基本体系在B点施加附加刚臂,约束B点的转动,得到基本体系。P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777(3)位移法方程 (4)计算系数和自由项令,作图如( 空1 )所示。(5分)P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777A. B. C. P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 D. E. F. 为研究对象,由P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777,得P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777( 空2 )(3分) G. 4P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 8P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 12P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 -12P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 作P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777图如( 空3 )所示。(4分) P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 由P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777,得P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777( 空4 )(3分) P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777 ;(2) ;(3) ;(4)A 共同学习P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777P-|||-A EI B-|||-2El l-|||-L/2,__ dfrac (1)(2) |c-|||-777
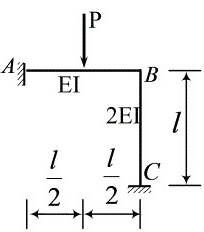
二、用位移法计算图示刚架,求出系数项和自由项。(15分)
解:
(1)基本未知量
这个刚架基本未知量只有一个结点B的角位移 。
。
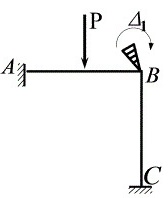
(2)基本体系
在B点施加附加刚臂,约束B点的转动,得到基本体系。
(3)位移法方程
(4)计算系数和自由项
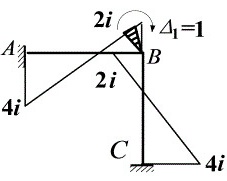
令,作图如( 空1 )所示。(5分)


B.
C.
D.
E.
F. 为研究对象,由
 ,得
,得 ( 空2 )(3分)
( 空2 )(3分)G. 4

8
12
-12
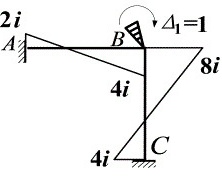
作
 图如( 空3 )所示。(4分)
图如( 空3 )所示。(4分)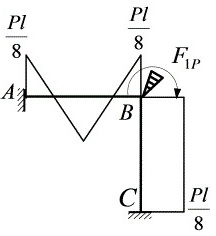

由
,得 ( 空4 )(3分)
( 空4 )(3分)



;(2)
;(3)
;(4)A
共同学习









题目解答
答案
空 2 空 3 空 4
解析
步骤 1:确定基本未知量
这个刚架基本未知量只有一个结点B的角位移。
步骤 2:建立基本体系
在B点施加附加刚臂,约束B点的转动,得到基本体系。
步骤 3:位移法方程
根据位移法方程,我们有:
\[ \delta_{11} \theta_1 + \delta_{1P} = 0 \]
其中,$\delta_{11}$是刚度系数,$\delta_{1P}$是自由项。
步骤 4:计算系数和自由项
令$\theta_1 = 1$,作图如( 空1 )所示。根据刚度系数的定义,我们有:
\[ \delta_{11} = \frac{E}{1} \]
其中,$E$是弹性模量,$I$是截面惯性矩。对于这个刚架,$E$和$I$是已知的,因此可以计算出$\delta_{11}$。
步骤 5:计算自由项
作$F_{1P}$图如( 空3 )所示。根据自由项的定义,我们有:
\[ \delta_{1P} = \frac{P l}{8} \]
其中,$P$是外力,$l$是长度。对于这个刚架,$P$和$l$是已知的,因此可以计算出$\delta_{1P}$。
步骤 6:求解位移法方程
将$\delta_{11}$和$\delta_{1P}$代入位移法方程,可以求解出$\theta_1$。
这个刚架基本未知量只有一个结点B的角位移。
步骤 2:建立基本体系
在B点施加附加刚臂,约束B点的转动,得到基本体系。
步骤 3:位移法方程
根据位移法方程,我们有:
\[ \delta_{11} \theta_1 + \delta_{1P} = 0 \]
其中,$\delta_{11}$是刚度系数,$\delta_{1P}$是自由项。
步骤 4:计算系数和自由项
令$\theta_1 = 1$,作图如( 空1 )所示。根据刚度系数的定义,我们有:
\[ \delta_{11} = \frac{E}{1} \]
其中,$E$是弹性模量,$I$是截面惯性矩。对于这个刚架,$E$和$I$是已知的,因此可以计算出$\delta_{11}$。
步骤 5:计算自由项
作$F_{1P}$图如( 空3 )所示。根据自由项的定义,我们有:
\[ \delta_{1P} = \frac{P l}{8} \]
其中,$P$是外力,$l$是长度。对于这个刚架,$P$和$l$是已知的,因此可以计算出$\delta_{1P}$。
步骤 6:求解位移法方程
将$\delta_{11}$和$\delta_{1P}$代入位移法方程,可以求解出$\theta_1$。