2⏺∴mO=±18″7,在水准测量中,每站观测高差的中误差均为±5mm,若从已知点推算待定点的高程中误差不大于±2cm,问最多设多少站?11dO=-dA-dB22MO=(1mA)2(1mB)2228,已知闭合导线各内角(右角)观测值及起始边方位角如下表,试求:① 内角和闭合差;②改正后内角;③各边坐标方位角;④确定各边坐标增量的符号;⑤求fx、fy、f及k;⑥求各边坐标增量改正数(写在坐标增量的上方);⑦计算改正后的坐标增量。⏺解:n=202=16需设16站52⏺x=0高程(m)⏺点内角改正后坐标边长纵坐标横坐标改正后观测值内角方位角增量增量号°′″°′″°′″(m)XY坐标增量XY121071910148350087.14074.36545.422387300089.96067.61859.334489142089.69062.04464.768111.95279.80478.5151755710∑β=∑D=fx=fy=fβ=f=K=解:点内角改正后坐标边长纵坐标横坐标观测值内角方位角增量增量改正后坐标增量(m)注:盘左视线水平时竖盘读数为 90°视线向上倾斜时竖盘读数减少。(4) 测量工作的组织原则是____从高级到低级____,__整体到局部__和_____由控制测量到碎部测量______。(5) 普通工程测绘工作中,大比例尺是指 ___1:500,1:1000,1:5000 ___,中比例尺是指___1:10000,1:25000,1:50000_____,小比例尺是指 __1:100000,1:250000,1:500000,1:1000000____。(6) 测量工作内容的三要素是指:__角度___测量,__距离___测量以及_高差____测量。(7) 测量工作中使用的坐标系,其X、Y坐标轴位置与数学上正相反,其原因是_测量学上用的方位角是从北端起算、而数学上角度从X轴起算,为了不改变数学公式,则必须改变坐标轴的名称,数学上的X轴改为Y轴,Y轴改为X轴,并且象限按顺时针排列。_。(8) 测量的任务包括测绘与放样两方面,测绘是_测量地面上的地物地貌绘制到图纸上___;放放样是__把图上的设计测设到地面上 ________(9) 测量工作的基准面是__水准面___、_大地水准面___和___参考椭球面_____;基准线是__垂线____和___法线。(10) 假定的平面直角坐标系,纵坐标轴可以采用__磁子午线方向__,_真子午线方向 __或_____建筑物主轴线方向 ____。(11) 钢尺丈量距离须做尺长改正,这是由于钢尺的__名义长度___与钢尺的__实际长度__不相等而引起的距离改正。当钢尺的实际长度变长时,丈量距离的结果要比实际距离_短____。(12) 丈量距离的精度,一般是采用__相对误差__来衡量,这是因为__误差与距离长短有关,对较长距离产生某一误差与较短距离产生同样大小误差,其精度是不同的,前者高,后者低_______。(13)尺丈量时的距离的温度改正数的符号与 ___测量时温度 ___有关,而倾斜改正数的符号与两点间高差的正负 ___无关_____( 14)线定向所用的标准方向,主要有__真子午线方向,磁子午线方向,纵坐标轴方向 ___。(15)地球上任意两点的真北方向在 ___赤道__处是互相平行的,其他各处的真北方向会聚于___北极_。(16)水准仪粗平是旋转 ___脚螺旋__使___圆水准器汽泡居中 __的气泡居中,目的是使__竖轴___线铅垂,而精平是旋转__微倾螺旋 使__水准管汽泡居中即符合 __,目的是使 ____视准轴__轴线水平。(17) 水准测量时,水准尺前倾会使读数变____大___,水准尺后倾会使读数变_大____。(18)水准测量时,把水准仪安置在距前、后尺大约相等的位置,其目的是为了消除 ___视准轴不平行与水准管轴的误差、地球曲率及折光差引起的误差 ____。( 19)经纬仪对中误差大小与偏心距的大小成___正___比,与边长的大小成_反___比。(19) 经纬仪的测站安置工作包括__对中__和___整平__,其目的分别是__水平度盘中心与测站在同铅垂线上,水平度盘处于水平位置_____。(21)回法测量水平角时,计算角度总是用右目标读数减左目标读数,其原因是 __水平度盘刻划注记是顺时针方向增加的。 ______。(22)水平角观测时,采用正倒镜观测主要是为了消除 ___视准轴误差__误差和___横轴误差____误差对观测角度的影响。(23)水平角观测时,不同测回之间起始方向变动度盘位置, 其目的是_________消除或减弱度盘刻划不均匀误差对测角的影响。⏺(24)测量误差按其性质可分为:A. ____ B. 系统误差 C. ___(b)__ D. 偶然误差 E. ___。 F. ⏺ G. ____人差_____,(b)___仪器误差____,(c)_外 ___。研究测量误差的目的是_消除或减弱测量误差和求得观测成果的精度,提出合理的观测方案。 __偶然误差,而_______系统误差可以通过计算改正或采用合理的观测方法加以消除或减弱,因此,测量误差理论主要是讨 _偶然__误差。 _观测值___减___真值___;而改正数是___真值 减_观测值__。 __同等技术水平的人,用同精度的仪器、使用同一种方法,在大致相同的外界条件下所进行的观测__ ___前述四个方面,只要一个方面不相同时所进行的观测 ___。 __7″ _;两次读数之差的中误差为 ___14″_;两次读数之和的中误差为 __14″__。 ___角度误差大小 __与___角度__大小无 关。 __两倍或三倍中误差作为偶然 _容许值_,称为__容许误差_ ___闭合导线__;②___附合导线__;③___支导线_。 __极坐标法____; _____直角坐标法____;③___方向交会法___;④____距离交会法_;⑤__方向距离交会法__。 __既表示地物又表示地貌____的图。
2
⏺
∴mO=±18″
7,在水准测量中,每站观测高差的中误差均为±5mm,若从已知点推算待定点的高程中误差不大于±2cm,问最多设多少站?
1
1
dO=-dA-
dB
2
2
MO=(1mA)2
(1mB)2
2
2
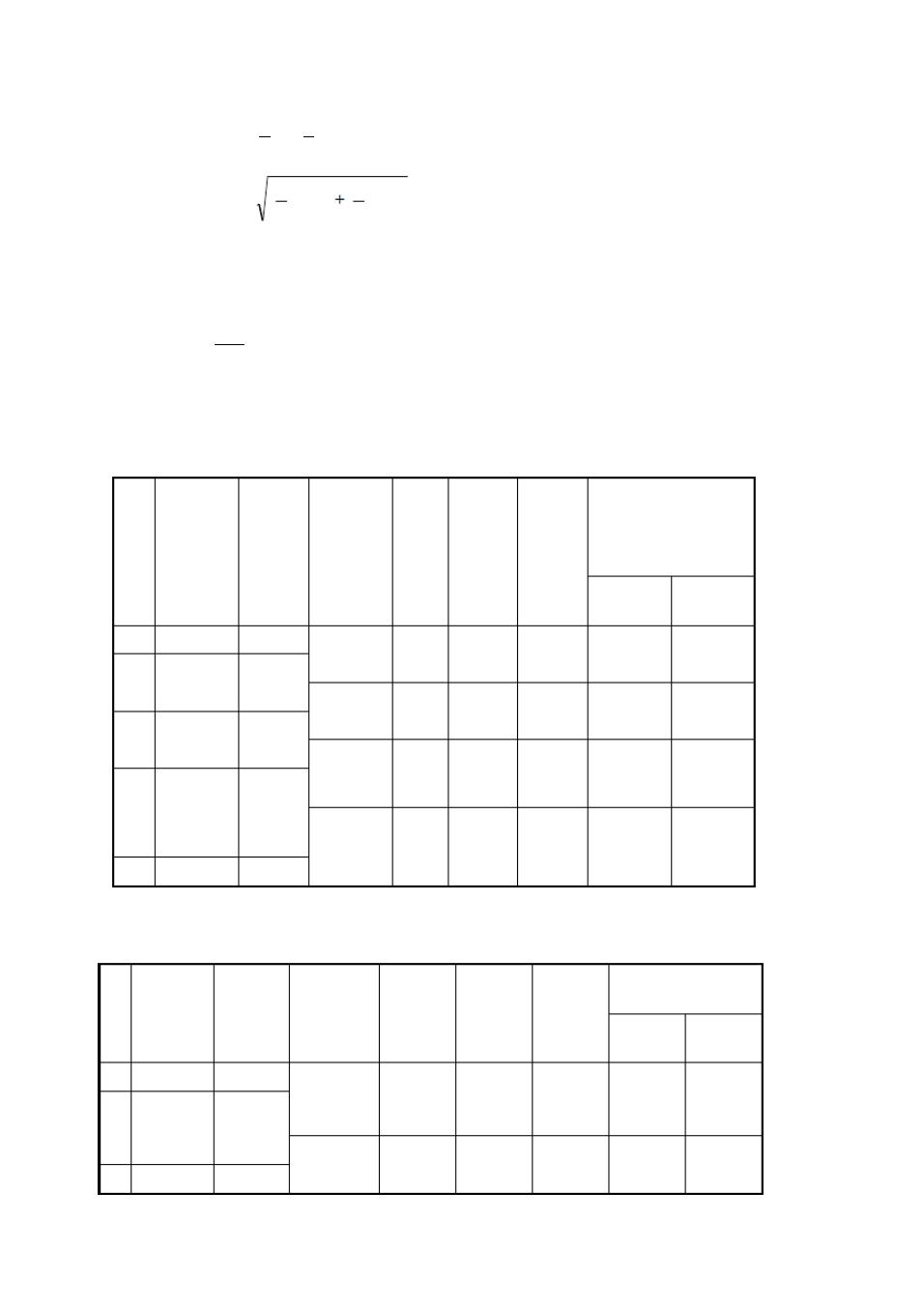
8,已知闭合导线各内角(右角)观测值及起始边方位角如下表,试求:
① 内角和闭合差;②改正后内角;③各边坐标方位角;④确定各边坐标增量的符号;⑤求fx、fy、f及k;⑥求各边坐标增量改正数(写在坐标增量的上方);⑦计算改正后的坐标增量。
⏺
解:n=202
=16
需设16站
52
⏺
x=0
高程
(m)
⏺
点
内
角
改正后
坐
标
边长
纵坐标
横坐标
改
正
后
观测值
内
角
方位角
增量
增量
号
°′″
°′″
°′″
(m)
X
Y
坐标增量
X
Y
1
2
1071910
1483500
87.140
74.365
45.422
3
873000
89.960
67.618
59.334
4
891420
89.690
62.044
64.768
111.952
79.804
78.515
1
755710
∑β=
∑D=
f
x=
f
y=
fβ=
f=
K=
解:
点
内角
改正后
坐
标
边长
纵坐标
横坐标
观测值
内
角
方位角
增
量
增量
改正后坐标增量
(m)
注:盘左视线水平时竖盘读数为 90°视线向上倾斜时竖盘读数减少。
(4) 测量工作的组织原则是____从高级到低级____,__整体到局部__和_____由控制测量到碎部测量______。
(5) 普通工程测绘工作中,大比例尺是指 ___1:500,1:1000,1:5000 ___,中比例尺是指___
1:10000,1:25000,1:50000_____,小比例尺是指 __1:100000,1:250000,1:500000,
1:1000000____。
(6) 测量工作内容的三要素是指:__角度___测量,__距离___测量以及_高差____测量。
(7) 测量工作中使用的坐标系,其X、Y坐标轴位置与数学上正相反,其原因是_测量学上用的方位角是从北端起算、而数学上角度从X轴起算,为了不改变数学公式,则必须改变坐标轴的名称,数学上的X轴改为Y轴,Y轴改为X轴,并且象限按顺时针排列。_。
(8) 测量的任务包括测绘与放样两方面,测绘是_测量地面上的地物地貌绘制到图纸上
___;放放样是__把图上的设计测设到地面上 ________
(9) 测量工作的基准面是__水准面___、_大地水准面___和___参考椭球面_____;基准
线是__垂线____和___法线。
(10) 假定的平面直角坐标系,纵坐标轴可以采用__磁子午线方向__,
_真子午线方向 __或_____建筑物主轴线方向 ____。
(11) 钢尺丈量距离须做尺长改正,这是由于钢尺的__名义长度___与钢尺的__实际长度
__不相等而引起的距离改正。当钢尺的实际长度变长时,丈量距离的结果要比实际距离_短____。
(12) 丈量距离的精度,一般是采用__相对误差__来衡量,这是因为__误差与距离长短有关,对较长距离产生某一误差与较短距离产生同样大小误差,其精度是不同的,
前者高,后者低_______。
(13)尺丈量时的距离的温度改正数的符号与 ___测量时温度 ___有关,而倾斜改正数
的符号与两点间高差的正负 ___无关_____
( 14)线定向所用的标准方向,主要有__真子午线方向,磁子午线方向,纵坐标轴方
向 ___。
(15)地球上任意两点的真北方向在 ___赤道__处是互相平行的,其他各处的真北方向会
聚于___北极_。
(16)水准仪粗平是旋转 ___脚螺旋__使___圆水准器汽泡居中 __的气泡居中,目的是使
__竖轴___线铅垂,而精平是旋转__微倾螺旋 使__水准管汽泡居中即符合 __,目的是
使 ____视准轴__轴线水平。
(17) 水准测量时,水准尺前倾会使读数变____大___,水准尺后倾会使读数变_大____。
(18)水准测量时,把水准仪安置在距前、后尺大约相等的位置,其目的是为了消除 ___视
准轴不平行与水准管轴的误差、地球曲率及折光差引起的误差 ____。
( 19)经纬仪对中误差大小与偏心距的大小成___正___比,与边长的大小成_反___比。
(19) 经纬仪的测站安置工作包括__对中__和___整平__,其目的分别是__水平度盘中心
与测站在同铅垂线上,水平度盘处于水平位置_____。
(21)回法测量水平角时,计算角度总是用右目标读数减左目标读数,其原因是 __水
平度盘刻划注记是顺时针方向增加的。 ______。
(22)水平角观测时,采用正倒镜观测主要是为了消除 ___视准轴误差__误差和___横轴
误差____误差对观测角度的影响。
(23)水平角观测时,不同测回之间起始方向变动度盘位置, 其目的是_________消除或
减弱度盘刻划不均匀误差对测角的影响。
⏺
(24)
测量误差按其性质可分为:
A. ____B. 系统误差
C. ___(b)__
D. 偶然误差
E. ___。
F. ⏺
G.
____人差_____,(b)___仪器误差____,(c)_外
___。研究测量误差的目的是_消除或减弱测量误差和求得观测成果的精度,提出合理的观测方案。
__偶然误差,而_______系统误差可以通过计算改正或采用合理的观测方法加以消除或减弱,因此,测量误差理论主要是讨
_偶然__误差。
_观测值___减___真值___;而改正数是___真值 减_观测值__。
__同等技术水平的人,用同精度的仪器、使用同一种方法,在大致相同的外界条件下所进行的观测__
___前述四个方面,只要一个方面不相同时所进行的观测 ___。
__7″
_;两次读数之差的中误差为 ___14″_;两次读数之和的中误差为 __14″__。
___角度误差大小 __与___角度__大小无
关。
__两倍或三倍中误差作为偶然
_容许值_,称为__容许误差_
___闭合导线__;②___附合导线__;③___支导线_。
__极坐标法____;
_____直角坐标法____;③___方向交会法___;④____距离交会法_;⑤__方向距离交会法__。
__既表示地物又表示地貌____的图。
题目解答
答案
(a)____ 系统误差 ___(b)__ 偶然误差 ___ 。 word/media/image3.jpeg 测量误差主要来自三个方面: (a)____ 人差 _____ , (b)___ 仪器误差 ____ , (c)_ 外 界环境条件的影响 ___ 。研究测量误差的目的是 _ 消除或减弱测量误差和求得观测成果的精度,提出合理的观测方案。 测量工作中所谓误差不可避免,主要是指 __ 偶然误差,而 _______ 系统误差可以通过计算改正或采用合理的观测方法加以消除或减弱,因此,测量误差理论主要是讨 论 _ 偶然 __ 误差。 (27) 真差是 _ 观测值 ___ 减 ___ 真值 ___ ;而改正数是 ___ 真值 减 _ 观测值 __ 。 同精度观测是指 __ 同等技术水平的人,用同精度的仪器、使用同一种方法,在大致相同的外界条件下所进行的观测 __ 不同精度观测是指 ___ 前述四个方面,只要一个方面不相同时所进行的观测 ___ 。 某经纬仪,观测者每读一次的中误差为± 10" ,则读两次取平均值,其中误差为 __7 ″ _ ;两次读数之差的中误差为 ___14 ″ _ ;两次读数之和的中误差为 __14 ″ __ 。 (30) 相对误差不能用于评定角度的精度,因为 ___ 角度误差大小 __ 与 ___ 角度 __ 大小无 关。 (31) 测量规范中要求测量误差不能超过某一限值, 常以 __ 两倍或三倍中误差作为偶然 误差的 _ 容许值 _ ,称为 __ 容许误差 _ 导线按形状可分为:① ___ 闭合导线 __ ;② ___ 附合导线 __ ;③ ___ 支导线 _ 。 (33) 测定碎部点平面位置的基本方法有:① __ 极坐标法 ____ ; _____ 直角坐标法 ____ ;③ ___ 方向交会法 ___ ;④ ____ 距离交会法 _ ;⑤ __ 方向距离交会法 __ 。 地形图是 __ 既表示地物又表示地貌 ____ 的图。